Diferencia entre las páginas «Archivo:MR 2018 barras muelle enunciado.png» y «Sep. 2018 (M.R.) Barra rotando alrededor de barra horizontal con muelle»
Sin resumen de edición |
(Página creada con «= Enunciado = right Una barra de longitud <math>2d</math> y masa despreciable (sólido "0") puede rotar alrededor del eje <math>OZ_1</math>. El punto <math>O</math> de la barra es fijo. La barra "0" siempre está contenida en el plano <math>OX_1Y_1</math>. Otra barra, también de longitud <math>2d</math> y masa <math>m</math> (sólido "2"), está conectada a la barra "0" por un pasador en el punto <math>A</math>. El pa…») |
||
| Línea 1: | Línea 1: | ||
= Enunciado = | |||
[[Imagen:MR_2018_barras_muelle_enunciado.png|right]] | |||
Una barra de longitud <math>2d</math> y masa despreciable (sólido "0") puede rotar alrededor del eje <math>OZ_1</math>. El punto <math>O</math> de la barra es fijo. La barra "0" siempre está contenida en el plano <math>OX_1Y_1</math>. Otra barra, también de longitud <math>2d</math> y masa <math>m</math> (sólido "2"), está conectada a la barra "0" por un pasador en el punto <math>A</math>. El pasador desliza sobre la barra "0". Además, la barra "2" gira alrededor de la barra "0". Un muelle de constante elástica <math>k</math> y longitud natural nula <math>l_0=d</math> conecta los puntos <math>O</math> y <math>A</math>. | |||
#Determina las reducciones cinemáticas <math>\{01\}, \{20\}</math> y <math>\{21\}</math> en <math>G</math>. | |||
#Calcula el momento cinético de la barra "2" respecto de <math>G</math>. | |||
#A partir de ahora suponemos que <math>\phi=\dot{\phi}=\ddot{\phi}=0</math>, es decir, la coordenada <math>\phi</math> ya no es un grado de libertad. Escribe las ecuaciones de Lagrange del sistema. | |||
#En <math>t=0</math> tenemos <math>s(0)=d</math>, <math>\theta(0)=-\pi/2</math>, <math>\dot{s}(0)=0</math> y <math>\dot{\theta}=0</math> (<math>\phi</math> sigue estando fijada). La barra "2" recibe una percusión <math>\vec{\hat{F}} = [\hat{F}_0, 0, \hat{F}_0]_1</math> en el punto B. Determina el estado del sistema justo después de la percusión. | |||
= Solución = | |||
== Reducciones cinemáticas en <math>G</math> == | |||
Para el movimiento {01} tenemos | |||
<center> | |||
<math> | |||
\vec{\omega}_{01} = \dot{\phi}\,\vec{k}_0, \qquad \vec{v}^{\,O}_{01} = \vec{0}. | |||
</math> | |||
</center> | |||
Teniendo en cuenta que | |||
<center> | |||
<math> | |||
\overrightarrow{OG} = s\,\vec{\imath}_0 + d\cos{\theta}\,\vec{\jmath}_0 + d\,\mathrm{sen}\,\theta\,\vec{k}_0, | |||
</math> | |||
</center> | |||
tenemos | |||
<center> | |||
<math> | |||
\vec{v}^{\,G}_{01} = \vec{v}^{\,O}_{01} + \vec{\omega}_{01}\times\overrightarrow{OG} | |||
=-d\dot{\phi}\cos\theta\,\vec{\imath}_0 + s\dot{\phi}\,\vec{\jmath}_0. | |||
</math> | |||
</center> | |||
Para el movimiento {20} | |||
<center> | |||
<math> | |||
\vec{\omega}_{20} = \dot{\theta}\,\vec{\imath}_0, \qquad \vec{v}^{\,A}_{01} = \dot{s}\,\vec{\imath}_0. | |||
</math> | |||
</center> | |||
Teniendo en cuenta que | |||
<center> | |||
<math> | |||
\overrightarrow{AG} = d\cos{\theta}\,\vec{\jmath}_0 + d\,\mathrm{sen}\,\theta\,\vec{k}_0, | |||
</math> | |||
</center> | |||
tenemos | |||
<center> | |||
<math> | |||
\vec{v}^{\,G}_{20} = \dot{s}\,\vec{\imath}_0 -d\dot{\theta}\,\mathrm{sen}\,\theta\,\vec{\jmath}_0 + d\dot{\theta}\cos\theta\,\vec{k}_0. | |||
</math> | |||
</center> | |||
Para el movimiento {21} usamos las leyes de composición | |||
<center> | |||
<math> | |||
\begin{array}{l} | |||
\vec{\omega}_{21} = \vec{\omega}_{20} + \vec{\omega}_{01} =\dot{\theta}\,\vec{\imath}_0 + \dot{\phi}\,\vec{k}_0.\\ | |||
\\ | |||
\vec{v}^{\,G}_{21} = \vec{v}^{\,G}_{20} + \vec{v}^{\,G}_{01} = | |||
(\dot{s} - d\dot{\phi}\cos\theta)\,\vec{\imath}_0 -d\dot{\theta}\,\mathrm{sen}\,\theta\,\vec{\jmath}_0 + d\dot{\theta}\cos\theta\,\vec{k}_0. | |||
\end{array} | |||
</math> | |||
</center> | |||
== Momento cinético de la barra respecto a <math>G</math> == | |||
El momento cinético respecto al Centro de Masas <math>G</math> es | |||
<center> | |||
<math> | |||
\vec{L}_G = \overset\leftrightarrow{I}_G\cdot\vec{\omega}_{21}. | |||
</math> | |||
</center> | |||
El tensor de inercia es | |||
<center> | |||
<math> | |||
\overset\leftrightarrow{I}_G | |||
\left[ | |||
\begin{array}{ccc} | |||
I_0 & 0 & 0\\ | |||
0 & I_0 & 0\\ | |||
0 & 0 & 0 | |||
\end{array} | |||
\right]_2 | |||
\qquad\qquad | |||
I_0 = \dfrac{1}{12}m(2d)^2 = \dfrac{1}{3}md^2. | |||
</math> | |||
</center> | |||
Hay que expresar <math>\vec{\omega}_{21}</math> en la base "2". Del dibujo tenemos | |||
<center> | |||
<math> | |||
\begin{array}{l} | |||
\vec{\imath}_0 = \vec{\imath}_2,\\ | |||
\vec{\jmath}_0 = \mathrm{sen}\,\theta\,\vec{\jmath}_2 + \cos\theta\,\vec{k}_2,\\ | |||
\vec{k}_0 = -\cos\theta\,\vec{\jmath}_2 + \mathrm{sen}\,\theta\,\vec{k}_2. | |||
\end{array} | |||
</math> | |||
</center> | |||
Entonces | |||
<center> | |||
<math> | |||
\vec{\omega}_{21} = \dot{\theta}\,\vec{\imath}_0 + \dot{\phi}\,\vec{k}_0 | |||
= | |||
\dot{\theta}\,\vec{\imath}_2 -\dot{\phi}\cos\theta\,\vec{\jmath}_0 + \dot{\phi}\,\mathrm{sen}\,\theta\,\vec{k}_2. | |||
</math> | |||
</center> | |||
El momento cinético es | |||
<center> | |||
<math> | |||
\vec{L}_G | |||
= | |||
\left[ | |||
\begin{array}{ccc} | |||
I_0 & 0 & 0\\ | |||
0 & I_0 & 0\\ | |||
0 & 0 & 0 | |||
\end{array} | |||
\right]_2 | |||
\left[ | |||
\begin{array}{c} | |||
\dot{\theta} \\ -\dot{\phi}\cos\theta \\ \dot{\phi}\,\mathrm{sen}\,\theta | |||
\end{array} | |||
\right]_2 | |||
= | |||
\left[ | |||
\begin{array}{c} | |||
I_0\dot{\theta} \\ -I_0\dot{\phi}\cos\theta \\ 0 | |||
\end{array} | |||
\right]_2 | |||
</math> | |||
</center> | |||
== Ecuaciones de Lagrange == | |||
Al restringir el grado de libertad <math>\phi</math>, el problema tiene sólo dos grados de libertad <math>\{s, \theta\}</math>. La reducción cinemática y el momento angular quedan | |||
<center> | |||
<math> | |||
\begin{array}{l} | |||
\vec{\omega}_{21} = [\dot{\theta},\, 0,\, 0]_0\\ | |||
\\ | |||
\vec{v}^{\,G}_{21} = | |||
[\dot{s},\, -d\dot{\theta}\,\mathrm{sen}\,\theta\, d\dot{\theta}\cos\theta]_0\\ | |||
\\ | |||
\vec{L}_G = [I_0\dot{\theta}, \, 0, \, 0]_0. | |||
\end{array} | |||
</math> | |||
</center> | |||
=== Energía cinética === | |||
Tenemos | |||
<center> | |||
<math> | |||
T = T_{tra} + T_{rot} | |||
</math> | |||
</center> | |||
Para la energía cinética de traslación | |||
<center> | |||
<math> | |||
T_{tra} = \dfrac{1}{2}m|\vec{v}^{\,G}_{21}|^2 | |||
= | |||
\dfrac{1}{2}m(\dot{s}^2 + d^2\dot{\theta}^2). | |||
</math> | |||
</center> | |||
La de rotación es | |||
<center> | |||
<math> | |||
T_{rot} = \dfrac{1}{2}\vec{L}_G\cdot\vec{\omega}_{21} | |||
= | |||
\dfrac{1}{6}md^2\dot{\theta}^2. | |||
</math> | |||
</center> | |||
Hemos usado la expresión de <math>\vec{\omega}_{21}</math> para calcular el producto escalar con el momento cinético <math>\vec{L}_G</math>. Entonces | |||
<center> | |||
<math> | |||
T = \dfrac{1}{6}m(3\dot{s}^2 + 4d^2\dot{\theta}^2). | |||
</math> | |||
</center> | |||
=== Energía potencial === | |||
Contribuyen el muelle y la gravedad | |||
<center> | |||
<math> | |||
U_g = m g d\,\mathrm{sen}\,\theta, \qquad U_k = \dfrac{1}{2}k(s-d)^2. | |||
</math> | |||
</center> | |||
Para la energía potencial gravitatoria hemos tomado como referencia el plano <math>OX_1Y_1</math>. La energía potencial total es | |||
<center> | |||
<math> | |||
U = U_g + U_k = | |||
m g d\,\mathrm{sen}\,\theta + \dfrac{1}{2}k(s-d)^2. | |||
</math> | |||
</center> | |||
=== Ecuaciones de Lagrange === | |||
La función de Lagrange es | |||
<center> | |||
<math> | |||
L = T - U = | |||
\dfrac{1}{6}m(3\dot{s}^2 + 4d^2\dot{\theta}^2) - | |||
m g d\,\mathrm{sen}\,\theta - \dfrac{1}{2}k(s-d)^2. | |||
</math> | |||
</center> | |||
Ecuación de Lagrange para <math>s</math>: | |||
<center> | |||
<math> | |||
\left. | |||
\begin{array}{l} | |||
\dfrac{\partial L}{\partial \dot{s}} = m\dot{s},\\ | |||
\\ | |||
\dfrac{\mathrm{d}}{\mathrm{d}t}\left(\dfrac{\partial L}{\partial \dot{s}}\right) = m\ddot{s},\\ | |||
\\ | |||
\dfrac{\partial L}{\partial s} = -k(s-d). | |||
\end{array} | |||
\right\} | |||
\to | |||
\ddot{s} + \dfrac{k}{m}(s-d) = 0 | |||
</math> | |||
</center> | |||
Ecuación de Lagrange para <math>\theta</math>: | |||
<center> | |||
<math> | |||
\left. | |||
\begin{array}{l} | |||
\dfrac{\partial L}{\partial \dot{\theta}} = \dfrac{4}{3}md^2\dot{\theta},\\ | |||
\\ | |||
\dfrac{\mathrm{d}}{\mathrm{d}t}\left(\dfrac{\partial L}{\partial \dot{\theta}}\right) = \dfrac{4}{3}md^2\ddot{\theta},\\ | |||
\\ | |||
\dfrac{\partial L}{\partial \theta} = -mgd\cos\theta. | |||
\end{array} | |||
\right\} | |||
\to | |||
\ddot{\theta} + \dfrac{3g}{4d}\cos\theta=0. | |||
</math> | |||
</center> | |||
En este caso las dos ecuaciones están desacopladas. | |||
== Percusión == | |||
El estado inicial del sistema es | |||
<center> | |||
<math> | |||
s(0) = d, \qquad \dot{s}(0) = 0, \qquad \theta(0) = -\pi/2, \qquad \dot{\theta}(0)=0. | |||
</math> | |||
</center> | |||
La percusión se aplica en <math>B</math> y vale <math>\vec{\hat{F}} = [\hat{F}_0, 0, \hat{F}_0]</math>. Vamos a necesitar la velocidad absoluta del punto <math>B</math>. Teniendo en cuenta que <math>\overrightarrow{GB} = [0,d\cos\theta, d\,\mathrm{sen}\,\theta]_0 </math>, tenemos | |||
<center> | |||
<math> | |||
\vec{v}^{\,B}_{21} = \vec{v}^{\,G}_{21} + \vec{\omega}_{21}\times\overrightarrow{GB} = | |||
[\dot{s}, -2d\dot{\theta}\,\mathrm{sen}\,\theta, 2d\dot{\theta}\cos\theta]_0. | |||
</math> | |||
</center> | |||
Los momentos generalizados son | |||
<center> | |||
<math> | |||
p_s = \dfrac{\partial L}{\partial \dot{s}} = m\dot{s}, \qquad | |||
p_{\theta} = \dfrac{\partial L}{\partial \dot{\theta}} = \dfrac{4}{3}md^2\dot{\theta}. | |||
</math> | |||
</center> | |||
Las ecuaciones de Lagrange impulsivas son | |||
<center> | |||
<math> | |||
\begin{array}{l} | |||
\Delta p_s = \hat{Q}^{NC}_s = \left.\vec{\hat{F}}\cdot\dfrac{\partial\vec{v}^{\,B}_{21}}{\partial \dot{s}}\right|_{t=0},\\ | |||
\\ | |||
\Delta p_{\theta} = \hat{Q}^{NC}_s = \left.\vec{\hat{F}}\cdot\dfrac{\partial\vec{v}^{\,B}_{21}}{\partial \dot{\theta}}\right|_{t=0}. | |||
\end{array} | |||
</math> | |||
</center> | |||
Como se parte del reposo | |||
<center> | |||
<math> | |||
\Delta p_s = m\dot{s}^+, \qquad \Delta p_{\theta} = \dfrac{4}{3}md^2\dot{\theta}^+. | |||
</math> | |||
</center> | |||
Tenemos | |||
<center> | |||
<math> | |||
\dfrac{\partial\vec{v}^{\,B}_{21}}{\partial \dot{s}} = [1,\,0,\,0]_0, | |||
\qquad | |||
\dfrac{\partial\vec{v}^{\,B}_{21}}{\partial \dot{\theta}} = [0,\, -2d\,\mathrm{sen}\,\theta, \, 2d\cos\theta ]_0. | |||
</math> | |||
</center> | |||
Por tanto | |||
<center> | |||
<math> | |||
\left.\dfrac{\partial\vec{v}^{\,B}_{21}}{\partial \dot{s}}\right|_{t=0} = [1,\,0,\,0]_0, | |||
\qquad | |||
\left.\dfrac{\partial\vec{v}^{\,B}_{21}}{\partial \dot{\theta}}\right|_{t=0} = [0,\, 2d, \, 0 ]_0. | |||
</math> | |||
</center> | |||
Las percusiones generalizadas son | |||
<center> | |||
<math> | |||
Q^{NC}_{s} = \hat{F}_0, \qquad Q^{NC}_{\theta} = 0. | |||
</math> | |||
</center> | |||
Y el estado después de la percusión es | |||
<center> | |||
<math> | |||
\dot{s}(0^+) = \dfrac{\hat{F}_0}{m}, \qquad \dot{\theta}(0^+) = 0. | |||
</math> | |||
</center> | |||
[[Categoría:Problemas de mecánica analítica]] | |||
[[Categoría:Problemas de Dinámica Analítica]] | |||
[[Categoría:Problemas de examen de Mecánica Racional]] | |||
Revisión actual - 12:49 8 nov 2023
Enunciado

Una barra de longitud y masa despreciable (sólido "0") puede rotar alrededor del eje . El punto de la barra es fijo. La barra "0" siempre está contenida en el plano . Otra barra, también de longitud y masa (sólido "2"), está conectada a la barra "0" por un pasador en el punto . El pasador desliza sobre la barra "0". Además, la barra "2" gira alrededor de la barra "0". Un muelle de constante elástica y longitud natural nula conecta los puntos y .








- Determina las reducciones cinemáticas y en .
- Calcula el momento cinético de la barra "2" respecto de .
- A partir de ahora suponemos que , es decir, la coordenada ya no es un grado de libertad. Escribe las ecuaciones de Lagrange del sistema.
- En tenemos , , y ( sigue estando fijada). La barra "2" recibe una percusión en el punto B. Determina el estado del sistema justo después de la percusión.










![{\displaystyle {\vec {\hat {F}}}=[{\hat {F}}_{0},0,{\hat {F}}_{0}]_{1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ae4a23b503f604c1368ebbf85e321e420e2f0f41)
Solución
Reducciones cinemáticas en
Para el movimiento {01} tenemos

Teniendo en cuenta que

tenemos

Para el movimiento {20}

Teniendo en cuenta que

tenemos

Para el movimiento {21} usamos las leyes de composición

Momento cinético de la barra respecto a
El momento cinético respecto al Centro de Masas es

El tensor de inercia es
![{\displaystyle {\overset {\leftrightarrow }{I}}_{G}\left[{\begin{array}{ccc}I_{0}&0&0\\0&I_{0}&0\\0&0&0\end{array}}\right]_{2}\qquad \qquad I_{0}={\dfrac {1}{12}}m(2d)^{2}={\dfrac {1}{3}}md^{2}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/37269dc5f1c7a263239a96c2075aa35a40fb3517)
Hay que expresar en la base "2". Del dibujo tenemos


Entonces

El momento cinético es
![{\displaystyle {\vec {L}}_{G}=\left[{\begin{array}{ccc}I_{0}&0&0\\0&I_{0}&0\\0&0&0\end{array}}\right]_{2}\left[{\begin{array}{c}{\dot {\theta }}\\-{\dot {\phi }}\cos \theta \\{\dot {\phi }}\,\mathrm {sen} \,\theta \end{array}}\right]_{2}=\left[{\begin{array}{c}I_{0}{\dot {\theta }}\\-I_{0}{\dot {\phi }}\cos \theta \\0\end{array}}\right]_{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dc996eec2dd249119be24488967d2e4b740e08af)
Ecuaciones de Lagrange
Al restringir el grado de libertad , el problema tiene sólo dos grados de libertad . La reducción cinemática y el momento angular quedan

![{\displaystyle {\begin{array}{l}{\vec {\omega }}_{21}=[{\dot {\theta }},\,0,\,0]_{0}\\\\{\vec {v}}_{21}^{\,G}=[{\dot {s}},\,-d{\dot {\theta }}\,\mathrm {sen} \,\theta \,d{\dot {\theta }}\cos \theta ]_{0}\\\\{\vec {L}}_{G}=[I_{0}{\dot {\theta }},\,0,\,0]_{0}.\end{array}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f66aef68b890f5e57444b4706d61ebff8c40f079)
Energía cinética
Tenemos

Para la energía cinética de traslación

La de rotación es

Hemos usado la expresión de para calcular el producto escalar con el momento cinético . Entonces


Energía potencial
Contribuyen el muelle y la gravedad

Para la energía potencial gravitatoria hemos tomado como referencia el plano . La energía potencial total es

Ecuaciones de Lagrange
La función de Lagrange es

Ecuación de Lagrange para :


Ecuación de Lagrange para :


En este caso las dos ecuaciones están desacopladas.
Percusión
El estado inicial del sistema es

La percusión se aplica en y vale . Vamos a necesitar la velocidad absoluta del punto . Teniendo en cuenta que , tenemos

![{\displaystyle {\vec {\hat {F}}}=[{\hat {F}}_{0},0,{\hat {F}}_{0}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c74504845096ff25661e04eb45d3e8c36ef687be)
![{\displaystyle {\overrightarrow {GB}}=[0,d\cos \theta ,d\,\mathrm {sen} \,\theta ]_{0}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ad29b3dbd6390be8914616511de963441f031407)
![{\displaystyle {\vec {v}}_{21}^{\,B}={\vec {v}}_{21}^{\,G}+{\vec {\omega }}_{21}\times {\overrightarrow {GB}}=[{\dot {s}},-2d{\dot {\theta }}\,\mathrm {sen} \,\theta ,2d{\dot {\theta }}\cos \theta ]_{0}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cab4d4c8dcf3ad613d4754475feefb37fdc237b4)
Los momentos generalizados son

Las ecuaciones de Lagrange impulsivas son

Como se parte del reposo

Tenemos
![{\displaystyle {\dfrac {\partial {\vec {v}}_{21}^{\,B}}{\partial {\dot {s}}}}=[1,\,0,\,0]_{0},\qquad {\dfrac {\partial {\vec {v}}_{21}^{\,B}}{\partial {\dot {\theta }}}}=[0,\,-2d\,\mathrm {sen} \,\theta ,\,2d\cos \theta ]_{0}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0964b443529aa4ec3893885b107b4c7376717527)
Por tanto
![{\displaystyle \left.{\dfrac {\partial {\vec {v}}_{21}^{\,B}}{\partial {\dot {s}}}}\right|_{t=0}=[1,\,0,\,0]_{0},\qquad \left.{\dfrac {\partial {\vec {v}}_{21}^{\,B}}{\partial {\dot {\theta }}}}\right|_{t=0}=[0,\,2d,\,0]_{0}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/76703a72063ff26a36b8eb366d8a94645b578305)
Las percusiones generalizadas son

Y el estado después de la percusión es

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Historial del archivo
Haz clic sobre una fecha y hora para ver el archivo tal como apareció en ese momento.
| Fecha y hora | Miniatura | Dimensiones | Usuario | Comentario | |
|---|---|---|---|---|---|
| actual | 12:49 8 nov 2023 | 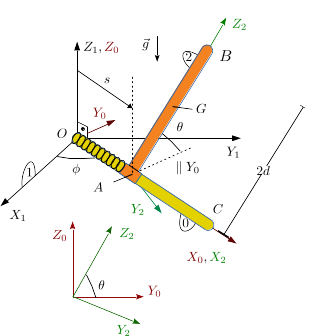 | 312 × 336 (43 kB) | Pedro (discusión | contribs.) |
No puedes sobrescribir este archivo.
Usos del archivo
Las siguientes páginas usan este archivo:
{kind=link}
{kind=link}
{kind=link}
{kind=link}