Enunciado
Un engranaje está formado por una cavidad circular de radio R (“sólido 1”) que se encuentra inmóvil y por cuyo perímetro interior rueda sin deslizar un disco homogéneo de masa m y radio r (sólido 2). Este disco está empujado por una varilla ideal sin masa cuyo extremo O está engranado a un eje de un motor y que está ranurada de manera que el disco 2 se halla ensartado son rozamiento en la ranura mediante un pequeño vástago de masa despreciable. Todo el sistema es horizontal por lo que no hace falta considerar el efecto del peso.
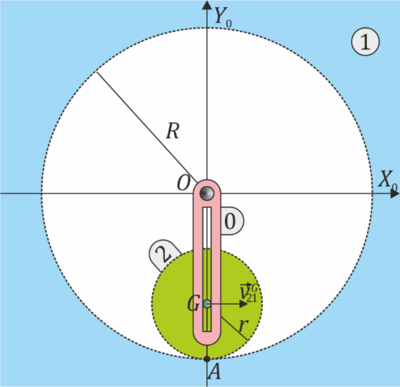
Considere un instante en el que el centro del disco se encuentra sobre el eje OY (ver figura). En ese instante la velocidad del centro G del disco 2 vale  y su aceleración tangencial vale
y su aceleración tangencial vale  .
.
Para ese instante y empleando el sistema de ejes indicado en la figura (con OZ hacia afuera del papel), halle:
- El vector velocidad angular y el vector aceleración angular del disco 2, de radio r.
- La aceleración del centro del disco 2 y la del punto A del disco 2 en contacto con el sólido 1.
- La energía cinética del disco 2, así como su momento cinético respecto a su centro y respecto al punto O, centro del sistema.
- Calcule las fuerzas que se ejercen sobre el disco 2 en su centro (por la varilla) y en el punto A.
- Halle el par que ejerce el motor en O para mantener el sistema en funcionamiento.
Velocidad y aceleración angulares
Velocidad angular
El vector velocidad angular del disco se obtiene aplicando que rueda sin deslizar sobre la corona. Aplicando el campo de velocidades del sólido

Emppleando los ejes indicados

lo que al sustituir nos da

y por tanto

Aceleración angular
La relación anterior

se cumple en todo instante, por lo que puede derivarse respecto al tiempo. Aquí  es la rapidez del centro del disco (no el vector velocidad). La derivada de la rapidez respecto al tiempo no es toda la aceleración, sino solo la aceleración tangencial, que en este caso nos dicen que vale
es la rapidez del centro del disco (no el vector velocidad). La derivada de la rapidez respecto al tiempo no es toda la aceleración, sino solo la aceleración tangencial, que en este caso nos dicen que vale  . Por ello
. Por ello

Aceleraciones
Del centro de masas
Como se ha dicho, el dato de no es toda la aceleración (que además debe ser un vector), sino solo la componente tangencial. Además está la componente normal

donde hay que tener en cuenta que el radio de la circunferencia que describe G no vale r ni R, sino R−r (distancia de G al centro del sistema). El vector aceleración normal es radial y hacia adentro de la circunferencia. Por tanto

Del punto A
Para obtener la aceleración de A, aplicamos la expresión del campo de aceleraciones

donde se cumple

y

Sustituimos y nos queda

Energía y momentos cinéticos
Energía cinética
La energía cinética de un cuerpo redondo en rotación, de acuerdo con el teorema de König, vale

lo que en este caso da

Momento cinético respecto al CM
Respecto al centro de masas, G, el momento cinético vale

Momento cinético respecto al punto O
Para el punto O, aplicamos el teorema de König para el momento cinético

Fuerzas
La partícula está sometida a dos fuerzas:
- Una con la que la varilla empuja al disco. Debido a la presencia de la ranura, esta solo puede ir en la dirección de OX

- Una en el punto de contacto A. Esta puede tener tanto componente en la dirección de avance, como en la normal

De acuerdo con el teorema de la cantidad de movimiento

Separamos por componentes

La segunda ecuación nos da la fuerza normal, pero la primera no es suficiente para determinar todas las fuerzas. Además debemos usar el teorema del momento cinético que en este caso da

lo que nos da

Por tanto obtenemos

y

Par
El par del motor mueve a la varilla, la cual empuja al disco. Como la varilla no tiene masa, todo el par del motor se emplea en mover al disco, por lo que

