Rotor de una sola masa
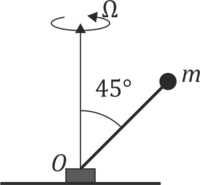
Se tiene un rotor formado por una masa m unida por una varilla rígida, sin masa, a un punto O, alrededor del cual la varilla gira con velocidad angular constante  . La varilla forma un ángulo de 45° con la dirección del eje de giro. Para mantener la rotación constante, en O es necesario aplicar un sistema de fuerzas que se reduce a
. La varilla forma un ángulo de 45° con la dirección del eje de giro. Para mantener la rotación constante, en O es necesario aplicar un sistema de fuerzas que se reduce a  .
.
Este sistema es equivalente a…
- A un sistema nulo.
- B una fuerza única.
- C un par de fuerzas.
- D un tornillo.
- Solución
La respuesta correcta es la B.
Siempre que tengamos un sistema formado por una sola partícula, el sistema de fuerzas que actúa sobre ella se podrá reducir a una fuerza única (o un sistema nulo), ya que para una única partícula basta aplicar una fuerza sobre ella para moverla.
Se puede demostrar a partir del teorema de la cantidad de movimiento y el del momento cinético. Consideramos un sistema de referencia  que gira con la velocidad
que gira con la velocidad  . En este sistema la posición de la partícula es
. En este sistema la posición de la partícula es

y su velocidad

siendo la cantidad de movimiento y el momento cinético

El teorema de la cantidad de movimiento nos da la fuerza

Se puede llegar a este resultado simplemente observando que P describe un movimiento circular uniforme alrededor del eje OZ.
Por el teorema del momento cinético tenemos

Por tanto, tenemos la reducción dinámica

El momento resultante no es nulo, pero sí ortogonal a la fuerza resultante. Por tanto el sistema equivale a una fuerza única.
Momento de inercia de un cilindro
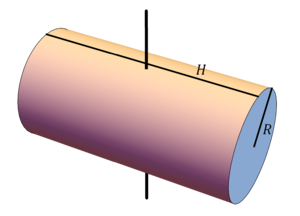
¿Cuánto vale el momento de inercia de un cilindro macizo homogéneo, de masa m, radio R y altura H, alrededor de un eje perpendicular a su cara lateral por el centro? (¡No haga integrales! Piense)
- A

- B

- C

- D

- Solución
La respuesta correcta es la C.
Cuando  debe reducirse al de una varilla para un eje ortogonal por su centro
debe reducirse al de una varilla para un eje ortogonal por su centro

y cuando H\to 0 debe reducirse al de un disco por un diámetro

Por ello, C es la opción correcta.
Disco arrastrado por una barra
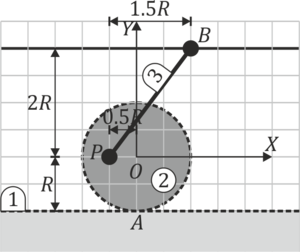
Se tiene un disco “2” de radio R que puede rodar sin deslizar sobre una superficie horizontal “1”. Un punto P del disco, situado a 0.5R del centro O, está unido por una varilla articulada “3” de longitud 2.5R a un pasador B, el cual se mueve con velocidad constante  sobre un eje horizontal situado a 2R sobre O. En un momento dado, el punto P está sobre la misma horizontal que O (ver figura). Para ese instante y empleando los ejes indicados…
sobre un eje horizontal situado a 2R sobre O. En un momento dado, el punto P está sobre la misma horizontal que O (ver figura). Para ese instante y empleando los ejes indicados…
Pregunta 1
¿Cuánto vale la velocidad angular  ?
?
- A

- B

- C

- D

- Solución
La respuesta correcta es la C.
La clave es fijarse qué ocurre con la velocidad de P, que es la articulación entre la varilla y el disco. Tenemos que

Por un lado tenemos que

y por otro lado el disco está rodando sin deslizar, con lo que tiene su CIR en A:

Igualamos componente a componente

siendo la solución del sistema

Pregunta 2
¿Dónde se encuentra el Centro Instantáneo de Rotación del movimiento {31}?
- A En

- B En

- C En

- D En el infinito en la dirección vertical.
- Solución
La respuesta correcta es la B.
Gráficamente se puede encontrar observando que debe estar en la recta perpendicular a  por B y debe estar alineado con P (CIR {32}) y A (CIR {21}). Trazando estas dos rectas, el punto de corte es .
por B y debe estar alineado con P (CIR {32}) y A (CIR {21}). Trazando estas dos rectas, el punto de corte es .
Alternativamente, puede hallarse su posición respecto a B

y respecto a O resulta la posición indicada

Pregunta 3
¿Cuánto vale la velocidad del centro del disco,  ?
?
- A
- B
- C

- D

- Solución
La respuesta correcta es la C.
Una vez que se tiene la velocidad angular, la lineal es inmediata

Percusión sobre cuerpo redondo
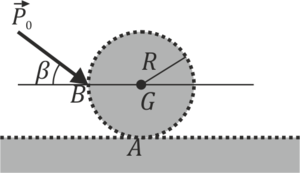
Un cuerpo redondo de masa m y radio R, con momento de inercia  , respecto a un eje ortogonal al plano por su centro, se encuentra en reposo situado sobre un plano horizontal. El cuerpo puede rodar sin deslizar sobre el plano horizontal. En un instante dado, se le aplica hacia adelante una percusión de módulo
, respecto a un eje ortogonal al plano por su centro, se encuentra en reposo situado sobre un plano horizontal. El cuerpo puede rodar sin deslizar sobre el plano horizontal. En un instante dado, se le aplica hacia adelante una percusión de módulo  y que forma un ángulo β con la horizontal. Esta percusión se aplica en un punto del diámetro a la misma altura que el centro G del disco.
y que forma un ángulo β con la horizontal. Esta percusión se aplica en un punto del diámetro a la misma altura que el centro G del disco.
Pregunta 1
Para el instante inmediatamente posterior a la percusión, ¿cómo es la velocidad del centro del rodillo?
- A Hacia adelante.
- B Hacia atrás.
- C Hacia adelante si β < 45° y hacia atrás si β > 45°.
- D Hacia adelante o hacia atrás, con un signo que depende del valor de γ.
- Solución
La respuesta correcta es la C.
Este problema es como el de una percusión sobre una varilla articulada, siendo ahora la articulación (instantánea) el punto A de contacto con el suelo. Si aplicamos el teorema del momento cinético en A, la única percusión que produce par es  .
.
- Si la recta soporte pasa por A el par es nulo y no hay rotación (ni traslación).
- Si β < 45° el par es negativo, la velocidad angular es negativa y la lineal del CM positiva, es decir, se mueve hacia adelante. Esto se ve claramente considerando el caso β = 0.
- Si β < 45° el par es positivo, la velocidad angular es positiva y la lineal del CM negativa, es decir, se mueve hacia atrás. Esto se ve claramente considerando el caso β = 90°.
Puede obtenerse analíticamente. El teorema de la cantidad de movimiento para una percusión nos da

Separamos por componentes (haciendo S = sen(β), C = cos(β))

El teorema del momento cinético nos da

Esta ecuación vectorial tiene solo la componente Z

De este sistema de ecuaciones resulta

El signo de  lo da si el coseno es mayor que el seno (ángulo menor de 45°) o si es menor (ángulo mayor de 45°).
lo da si el coseno es mayor que el seno (ángulo menor de 45°) o si es menor (ángulo mayor de 45°).
Pregunta 2
Según el valor de β, ¿cómo es la percusión de reacción que se produce en el punto A de contacto del disco con el suelo?
- A Siempre en la dirección de la recta que pasa por A y G.
- B Siempre en la dirección de la recta que pasa por A y B.
- C Tiene una componente vertical hacia arriba, y una horizontal que puede ir hacia adelante o hacia atrás.
- D Tiene una componente vertical hacia arriba y una horizontal siempre hacia atrás, siendo la dirección dependiente de β.
- Solución
La respuesta correcta es la D.
La percusión de reacción impide el movimiento del punto A. Su componente vertical impide que penetre en el suelo. También habrá una componente horizontal que impide que se deslice hacia adelante. Esta componente irá siempre, por tanto, hacia atrás. Su valor, no obstante, no tiene por qué coincidir con el de la vertical, ya que ambas dependen del ángulo, y por tanto no formará un ángulo de 45° y no tiene por qué pasar por B.
Analíticamente, del resultado de la pregunta anterior

Esta percusión no es puramente vertical ni forma un ángulo de 45°, sino que su dirección depende de β. Eso sí, su componente x es siempre negativa.
Número de grados de libertad
Una partícula de masa m se encuentra ensartada simultáneamente en dos varillas giratorias que se mueven en el plano OXY, como indica la figura.
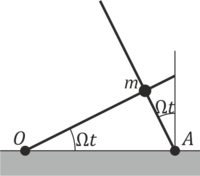
¿Cuántos grados de libertad tiene la partícula?
- Solución
La respuesta correcta es la A.
El movimiento de la partícula está completamente determinado por el de las dos varillas, sin poder ir en ninguna otra dirección. El estar ensartado en una varilla supone 1 grado de libertad, pero la presencia de la segunda varilla elimina esa grado y deja el total en 0.
Movimiento instantáneo de un sólido
Un sólido se mueve de manera que el origen de coordenadas tiene velocidad, en m/s,  . La velocidad angular del sólido es
. La velocidad angular del sólido es  . Si sabemos que el movimiento es de rotación, ¿cuánto vale c?
. Si sabemos que el movimiento es de rotación, ¿cuánto vale c?
- A
 .
.
- B
 .
.
- C No hay suficiente información para hallar c.
- D
 .
.
- Solución
La respuesta correcta es la B.
Para que sea un movimiento de rotación, la velocidad angular debe ser no nula (lo es) y ser perpendicular a la velocidad da un punto. Por tanto

Desplazamientos virtuales
Una partícula se mueve en el plano OXY de manera que sus coordenadas polares cumplen, en todo momento,

¿Qué ecuación cumplen los desplazamientos virtuales de esta partícula?
- A
 .
.
- B
 .
.
- C
 .
.
- D
 .
.
- Solución
La respuesta correcta es la A.
Por eliminación es simple ya que los desplazamientos virtuales se expresan con la letra δ y no contienen el término en δt.
Analíticamente, primero derivamos respecto al tiempo

Multiplicamos por dt

Esta es la ecuación que cumplen los desplazamientos posibles. Los virtuales cumplen la misma ecuación, pero omitiendo el término en dt.

Sistema de poleas
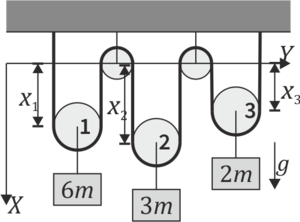
Se tiene el sistema de poleas de la figura. Las poleas son todas ideales (sin masa y sin rozamiento) y de ellas penden las masas indicadas.
Pregunta 1
¿Cuál de las siguientes es una expresión de la lagrangiana del sistema, en un sistema mínimo de coordenadas (tantas como grados de libertad)?
- A

- B

- C

- D

- Solución
La respuesta correcta es la B.
Este sistema tiene 2 grados de libertad. Podemos, por ejemplo, sujetar la primera pesa y bajar la segunda, o sujetar la segunda y hacer bajar la primera. Esto nos deja con dos opciones B o D. Para ver cuál es la correcta calculamos la lagrangiana. Si no hubiera vínculo sería

pero las posiciones están ligadas por la restricción de que la longitud del cable es constante. Por tanto

Despejamos  en función de las otras dos coordenadas
en función de las otras dos coordenadas

Sustituimos en la expresión anterior

Desarrollamos y, quitando una constante que no afecta a la lagrangiana, queda

que es la opción B.
Pregunta 2
¿Cuánto valen las aceleraciones de cada una de las masas en este sistema?
- A
 ,
,  ,
, 
- B
 ,
,  ,
,
- C ,
 ,
, 
- D ,
 ,
, 
- Solución
La respuesta correcta es la A.
Una vez que tenemos la lagrangiana, calculamos las ecuaciones de movimiento

lo que nos da, para  ,
,

y para 

Resolvemos este sistema de dos ecuaciones con dos incógnitas y el resultado es

La tercera aceleración sale de la ecuación de vínculo






