Enunciado
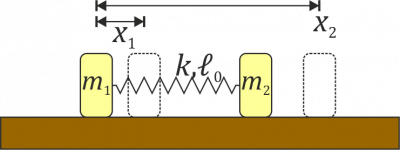
Como en el problema “Dos masas unidas por un muelle” tenemos dos masas  y
y  se mueven a lo largo del eje OX unidas por un resorte de constante
se mueven a lo largo del eje OX unidas por un resorte de constante  y longitud natura
y longitud natura  . Inicialmente las dos masas se encuentran en reposo en
. Inicialmente las dos masas se encuentran en reposo en  y
y  . Entonces se le comunica a la masa una velocidad
. Entonces se le comunica a la masa una velocidad  en el sentido positivo del eje.
en el sentido positivo del eje.
- Determine la lagrangiana del sistema en función de las posiciones de las dos partículas.
- Obtenga las ecuaciones de movimiento para
 y
y 
Realice el cambio de variables a las coordenadas generalizadas  ,
,  .
.
- ¿Cómo queda la lagrangiana en función de estas coordenadas?
- Obtenga las ecuaciones de movimiento para
 y
y  .
.
- Determine dos constantes de movimiento para este sistema.
Lagrangiana en función de x1 y x2
- Energía cinética
Las dos partículas describen un movimiento rectilíneo, por lo que la energía cinética es simplemente

- Energía potencial
Esta es la elástica debida a la elongación del resorte

- Lagrangiana
Restamos las dos cantidades anteriores

Ecuaciones de movimiento para x1 y x2
Aplicamos la ecuación de Lagrange a cada una de las coordenadas
- Para la coordenada x1
- Tenemos que

- y

- lo que da

- Para la coordenada x2
- De la misma manera

- y

- lo que nos da

Estas son las mismas ecuaciones a las que se llega de forma simple partiendo de la segunda ley de Newton.
Lagrangiana en función de x y xG
Ninguna de las dos coordenadas es cíclica, ya que ambas aparecen en la energía potencial. Esto produce como resultado dos ecuaciones diferenciales acopladas.
Podemos separarlas mediante el cambio de variables sugerido. Si hacemos

las coordenadas originales se escriben en función de las nuevas como

y las velocidades

Llevando esto a la energía cinética, tras operar nos queda

que podemos leer como un caso particular del teorema de König para la energía cinética.
En cuanto a la potencial, su nueva expresión es

lo que nos da la lagrangiana

Ecuaciones de movimiento para x y xG
- Para la coordenada xG

- y

- lo que da

- Para la coordenada x
- De la misma manera

- y

- lo que nos da

Ahora sí resultan ecuaciones desacopladas, cada una de las cuales puede integrarse por separado. La primera es trivial

y la segunda es la de un oscilador armónico

con solución

Los valores de las constantes salen de las condiciones iniciales. Para la posición del CM

lo que nos da, para todo instante

Para la elongación del muelle

siendo por tanto la elongación para todo instante

Conocidas las dos coordenadas obtenemos las posiciones de las dos masas


Constantes de movimiento
Empleando las nuevas coordenadas, vemos que xG es cíclica, esto es, no aparece en la lagrangiana. Por tanto su momento conjugado es una constante de movimiento

Esta magnitud no es otra que la cantidad de movimiento del sistema.
La otra constante procede de que la lagrangiana no depende del tiempo. Como además la energía cinética es una función cuadrática de las velocidades, la cantidad conservada es la energía mecánica

