Enunciado
Una partícula describe una curva cuya ecuación en coordenadas polares es

- Calcule la velocidad y la aceleración en cada instante.
- Halle las componentes intrínsecas de la aceleración para todo
 .
.
- Calcule el radio y el centro de curvatura en todo momento.
- ¿De qué tipo de movimiento se trata?
Velocidad y aceleración
Velocidad
La expresión de la velocidad empleando coordenadas polares es

donde, en este caso

que, sustituyendo nos da

Aceleración
La expresión correspondiente para la aceleración es

siendo

lo que nos da la aceleración

Componentes intrínsecas
Tangencial
Una vez que tenemos la velocidad y la aceleración podemos hallar la aceleración tangencial algebraicamente

o bien a partir de la rapidez

Para emplear el segundo método, calculamos en primer lugar la rapidez

El movimiento es entonces uniforme y por tanto

Algebraicamente puede verse que la velocidad y la aceleración son ortogonales en todo momento, y por tanto se anula la componente tangencial.
Normal
Si la aceleración tangencial es nula, la aceleración normal es toda la que hay

En módulo la aceleración normal vale

Radio y centro de curvatura
Radio de curvatura
Conocidas la aceleración normal y la rapidez, hallamos el radio de curvatura.

Vemos que resulta un radio de curvatura constante.
Centro de curvatura
El centro de curvatura lo obtenemos a partir del vector de posición, el vector normal y el radio de curvatura

El vector normal en este caso es el unitario en la dirección y sentido de la aceleración normal

mientras que el vector de posición viene dado por

lo que nos da el centro de curvatura

Identificación del movimiento
Hemos obtenido que:
- El movimiento es plano
- El radio de curvatura es constante
- La rapidez es constante
Estas tres propiedades identifican el movimiento como circular uniforme. La partícula describe circunferencias a ritmo constante alrededor de un punto fijo que es el centro de curvatura.
A la vista de la expresión del centro de curvatura

parecería que este punto es variable en el tiempo. Sin embargo, no es así. Si en lugar de la base vectorial de polares empleamos la de cartesianas, relacionada con la otra por

vemos que

que es evidentemente un punto fijo.
Conocido el radio y la rapidez, obtenemos la velocidad angular dividiendo una por el otro

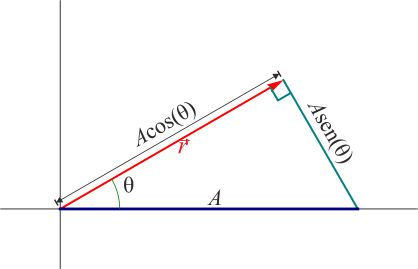
Podemos describir la trayectoria sin recurrir a su expresión en cartesianas, observando que en cada instante el vector de posición forma un ángulo  con el eje OX y tiene por módulo
con el eje OX y tiene por módulo  . Esto quiere decir que se puede considerar un cateto de un triángulo rectángulo de ángulo
. Esto quiere decir que se puede considerar un cateto de un triángulo rectángulo de ángulo  . La hipotenusa de este triángulo mide
. La hipotenusa de este triángulo mide  para todo instante y se encuentra sobre el eje OX.
para todo instante y se encuentra sobre el eje OX.
Ahora bien, según se ve en el estudio del arco capaz si tenemos un triángulo cuya hipotenusa AB es fija y cuyo ángulo en el vértice va variando, el tercer vértice P describe un arco de circunferencia de radio  . El ángulo que forma CP con el eje OX es el doble del del vértice,
. El ángulo que forma CP con el eje OX es el doble del del vértice,  .
.
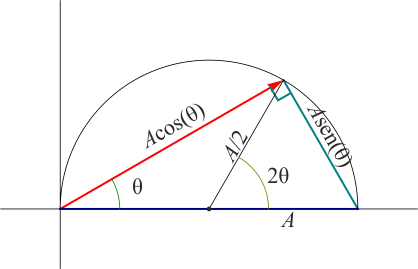
Vemos entonces que la partícula efectivamente describe una circunferencia con velocidad angular constante, siendo su velocidad angular 
Esta identificación también se puede hacer empleando coordenadas cartesianas. La ecuación de la trayectoria, en polares, es

Si multiplicamos por  en los dos miembros nos queda
en los dos miembros nos queda

y esto, en cartesianas, se escribe

o, equivalentemente,

que es la ecuación de una circunferencia de centro  y radio .
y radio .


