Diferencia entre las páginas «Archivo:MR GIC Barra muelle horizontal.png» y «Barra con muelle horizontal, Febrero 2016 (MR G.I.C.)»
Sin resumen de edición |
(Página creada con «== Enunciado == right Una barra de longitud <math>2a</math> y masa <math>m</math> (sólido "2") desliza con un extremo (punto <math>A</math>) apoyado sobre un plano horizontal liso. El extremo <math>A</math> está unido a un muelle de constante elástica k y longitud natural nula anclado en <math>C</math> que se mantiene siempre horizontal. La gravedad actúa verticalmente hacia abajo. En <math>t=0</math> la barra estaba e…») |
||
| Línea 1: | Línea 1: | ||
== Enunciado == | |||
[[Imagen:MR_GIC_Barra_muelle_horizontal.png|right]] | |||
Una barra de longitud <math>2a</math> y masa <math>m</math> (sólido "2") desliza con un extremo (punto <math>A</math>) apoyado sobre un plano horizontal liso. El extremo <math>A</math> está unido a un muelle de constante elástica k y longitud natural nula anclado en <math>C</math> que se mantiene siempre horizontal. La gravedad actúa verticalmente hacia abajo. En <math>t=0</math> la barra estaba en reposo, el punto <math>A</math> coincidía con <math>O_1</math> y la barra estaba completamente vertical. | |||
# Encuentra la expresión que da la cantidad de movimiento de la barra. | |||
# Encuentra la expresión que da el momento cinético de la barra respecto del punto <math>A </math>. | |||
#Determina las ecuaciones de movimiento del sistema. | |||
#¿Cómo es la fuerza de ligadura en el punto <math>A </math>? | |||
#Supongamos que se fuerza al punto <math>A</math> a moverse con velocidad uniforme <math>\vec{v}^{\,A}_{21} = v_0\,\vec{\imath}_1</math>. ¿Cual de estas fuerzas aplicadas en <math>A</math> consigue ese efecto? | |||
== Solución == | |||
=== Cantidad de movimiento === | |||
Vamos a determinar la reducción cinemática de la barra. Al ser un movimiento plano, y dado que el eje <math>X_2 </math> forma un ángulo <math>\theta </math> con el eje fijo <math>X_1 </math>, el vector rotación es | |||
<center> | |||
<math> | |||
\vec{\omega}_{21} = \dot{\theta}\,\vec{k} | |||
</math> | |||
</center> | |||
Por otro lado, la velocidad absoluta del punto <math>A </math> de la barra es | |||
<center> | |||
<math> | |||
\vec{v}^{\,A}_{21} = \dot{s}\,\vec{\imath}_1 | |||
</math> | |||
</center> | |||
Ahora calculamos la velocidad en el centro de masas de la barra | |||
<center> | |||
<math> | |||
\vec{v}^{\,G}_{21} = \vec{v}^{\,A}_{21} + \vec{\omega}_{21}\times\overrightarrow{AG} | |||
</math> | |||
</center> | |||
Como | |||
<center> | |||
<math> | |||
\overrightarrow{AG} = a\,\vec{\imath}_2 = a\cos\theta\,\vec{\imath}_1 + a\,\mathrm{sen}\,\theta\,\vec{\jmath}_1 | |||
</math> | |||
</center> | |||
tenemos | |||
<center> | |||
<math> | |||
\vec{v}^{\,G}_{21} = (\dot{s} - a\dot{\theta}\,\mathrm{sen}\,\theta | |||
)\,\vec{\imath}_1 + a\dot{\theta}\cos\theta\,\vec{\jmath}_1 | |||
</math> | |||
</center> | |||
y la cantidad de movimiento de la barra es | |||
<center> | |||
<math> | |||
\vec{C} = m\vec{v}^{\,G}_{21} = m(\dot{s} - a\dot{\theta}\,\mathrm{sen}\,\theta | |||
)\,\vec{\imath}_1 + ma\dot{\theta}\cos\theta\,\vec{\jmath}_1 | |||
</math> | |||
</center> | |||
=== Momento cinético en <math>A</math> === | |||
Calculamos primero el momento cinético en el centro de masas de la barra. El ser un movimiento plano, el momento cinético y el vector rotación son paralelos. La relación entre ellos es | |||
<center> | |||
<math> | |||
\vec{L}_G = I\,\vec{\omega}_{21} | |||
</math> | |||
</center> | |||
Aquí, <math>I</math> es el momento de inercia de la barra respecto a un eje perpendicular a ella que pase por el centro de masas: | |||
<center> | |||
<math> | |||
I = \dfrac{1}{12}m(2a)^2 = \dfrac{1}{3}ma^2 | |||
</math> | |||
</center> | |||
Entonces el momento cinético en el centro de masas es | |||
<center> | |||
<math> | |||
\vec{L}_G = I\dot{\theta}\,\vec{k} | |||
</math> | |||
</center> | |||
No ponemos subíndice en el vector <math>\vec{k}</math> pues, en un movimiento plano, es el mismo para todos los sólidos. | |||
Calculamos ahora el momento cinético en <math>A</math> usando la ecuación del campo de momentos cinéticos | |||
<center> | |||
<math> | |||
\vec{L}_A = \vec{L}_G + \vec{C}\times\overrightarrow{GA} | |||
= \vec{L}_G - \vec{C}\times\overrightarrow{AG} | |||
</math> | |||
</center> | |||
Haciendo el cálculo tenemos | |||
<center> | |||
<math> | |||
\vec{L}_A = (-ma\dot{s}\,\mathrm{sen}\,\theta + (I+ma^2)\dot{\theta})\,\vec{k} | |||
</math> | |||
</center> | |||
=== Ecuaciones de movimiento del sistema === | |||
[[Imagen:MR_GIC_Barra_muelle_horizontal_fuerzas.png|right]] | |||
Vamos a usar los métodos de la Dinámica Vectorial. Primero dibujamos el diagrama | |||
de fuerzas y momentos que actúan sobre la barra. La única ligadura que actúa, | |||
(aparte del hecho de que el movimiento es plano) es la que impone que el punto | |||
<math>A</math> de la barra no puede penetrar en el suelo. Por tanto hay que | |||
introducir una fuerza de ligadura en <math>A</math> con componente vertical no | |||
nula. Por otro lado, hay dos fuerzas activas actuando sobre la barra: el peso, | |||
aplicado en <math>G</math>, y la fuerza que ejerce el muelle en <math>A</math>. | |||
Expresamos estas fuerzas en la base "1" | |||
<center> | |||
<math> | |||
\begin{array}{l} | |||
\vec{P} = -mg\,\vec{\jmath}_1\\ | |||
\\ | |||
\vec{F}_k = -k(s-d)\,\vec{\imath}_1\\ | |||
\\ | |||
\vec{N}_A = N\,\vec{\jmath}_1 | |||
\end{array} | |||
</math> | |||
</center> | |||
==== T.C.M.==== | |||
El Teorema de la Cantidad de Movimiento nos dice | |||
<center> | |||
<math> | |||
\dot{\vec{C}} = \vec{P} + \vec{F}_k + \vec{N}_A | |||
</math> | |||
</center> | |||
Para calcular la derivada de la cantidad de movimiento, calculamos primero la | |||
derivada temporal de la reducción cinemática en <math>A</math> | |||
<center> | |||
<math> | |||
\begin{array}{l} | |||
\vec{a}^{\,A}_{21} = | |||
\left.\dfrac{\mathrm{d}\vec{v}^{\,A}_{21}}{\mathrm{d}t}\right|_1 = | |||
\ddot{s}\,\vec{\imath}_1 | |||
\\ | |||
\\ | |||
\vec{\alpha}_{21} = | |||
\left.\dfrac{\mathrm{d}\vec{\omega}_{21}}{\mathrm{d}t}\right|_1 = | |||
\ddot{\theta}\,\vec{\imath}_1 | |||
\end{array} | |||
</math> | |||
</center> | |||
Ahora usamos la ecuación del campo de aceleraciones para calcular la aceleración | |||
absoluta del centro de masas de la barra | |||
<center> | |||
<math> | |||
\vec{a}^{\,G}_{21} = \vec{a}^{\,A}_{21} + \vec{\alpha}\times\overrightarrow{AG} | |||
- |\vec{\omega}_{21}|^2\overrightarrow{AG} | |||
= | |||
(\ddot{s} - a\ddot{\theta}\,\mathrm{sen}\,\theta | |||
-a\dot{\theta}^2\cos\theta)\,\vec{\imath}_1 | |||
+ | |||
(a\ddot{\theta}\cos\theta - | |||
a\ddot{\theta}^2\,\mathrm{sen}\,\theta)\,\vec{\jmath}_1 | |||
</math> | |||
</center> | |||
Esta aceleración también puede calcularse derivando respecto al tiempo la | |||
expresión de <math>\vec{v}^{\,G}_{21}</math>. La derivada temporal de la | |||
cantidad de movimiento es | |||
<center> | |||
<math> | |||
\dot{\vec{C}} = m\vec{a}^{\,G}_{21} = m(\ddot{s} - a\ddot{\theta}\,\mathrm{sen}\,\theta | |||
-a\dot{\theta}^2\cos\theta)\,\vec{\imath}_1 | |||
+ | |||
m(a\ddot{\theta}\cos\theta - | |||
a\ddot{\theta}^2\,\mathrm{sen}\,\theta)\,\vec{\jmath}_1 | |||
</math> | |||
</center> | |||
Cada componente del T.C.M. nos da una ecuación diferencial | |||
<center> | |||
<math> | |||
\begin{array}{llr} | |||
(X): & m(\ddot{s} - a\ddot{\theta}\,\mathrm{sen}\,\theta | |||
-a\dot{\theta}^2\cos\theta) = -k(s-d) & (1) | |||
\\ | |||
&&\\ | |||
(Y): & m(a\ddot{\theta}\cos\theta - | |||
a\ddot{\theta}^2\,\mathrm{sen}\,\theta) = -mg + N & (2) | |||
\end{array} | |||
</math> | |||
</center> | |||
==== T.M.C. ==== | |||
Vamos a aplicar el Teorema del Momento Cinético en el punto <math>A</math>, pues | |||
así sólo el peso interviene en el momento neto de las fuerzas. El punto | |||
<math>A</math> es móvil, por lo que el teorema se escribe | |||
<center> | |||
<math> | |||
\dot{\vec{L}}_A = \vec{M}^{\mathrm{ext}}_A + | |||
\vec{C}\times\dot{\overrightarrow{O_1A}} | |||
</math> | |||
</center> | |||
La derivada del momento cinético es | |||
<center> | |||
<math> | |||
\dot{\vec{L}}_A = ( (I+ma^2)\ddot{\theta} - ma\ddot{s}\,\mathrm{sen}\,\theta - | |||
ma\dot{s}\dot{\theta}\cos\theta)\,\vec{k} | |||
</math> | |||
</center> | |||
Sólo el peso ejerce momento | |||
<center> | |||
<math> | |||
\vec{M}^{\mathrm{ext}}_A = \overrightarrow{AG}\times\vec{P} = -mga\cos\theta | |||
</math> | |||
</center> | |||
El término que falta es | |||
<center> | |||
<math> | |||
\vec{C}\times\dot{\overrightarrow{O_1A}} = | |||
\vec{C}\times(\dot{s}\,\vec{\imath}_1) = -ma\dot{s}\dot{\theta}\cos\theta\,\vec{k} | |||
</math> | |||
</center> | |||
Por tanto, la ecuación que obtenemos del T.M.C. es | |||
<center> | |||
<math> | |||
(I+ma^2)\ddot{\theta} - ma\ddot{s}\,\mathrm{sen}\,\theta | |||
= | |||
-mga\cos\theta | |||
\qquad (3) | |||
</math> | |||
</center> | |||
Las ecuaciones (1) y (3) son ecuaciones diferenciales para los grados de | |||
libertad <math>\{s(t), \theta(t)</math>. La ecuación (2) nos da el valor de la | |||
fuerza de ligadura | |||
=== Fuerza de ligadura en <math>A</math> === | |||
Usando la ecuación (2) tenemos | |||
<center> | |||
<math> | |||
\vec{N}_A = (mg-ma\dot{\theta}^2\,\mathrm{sen}\,\theta + | |||
ma\ddot{\theta}\cos\theta)\,\vec{\jmath}_1 | |||
</math> | |||
</center> | |||
=== Movimiento de <math>A</math> restingido === | |||
Para imponer el movimiento del punto <math>A</math> hay que aplicar una fuerza | |||
de ligadura extra, pues lo que se impone es una traslación restringida. Esta | |||
fuerza es de la forma | |||
<center> | |||
<math> | |||
\vec{F}_A = F\,\vec{\imath}_1 | |||
</math> | |||
</center> | |||
Este vínculo disminuye en 1 el número de grados de libertad. Las incógnitas | |||
ahora son | |||
<center> | |||
<math> | |||
\{\theta, N, F\} | |||
</math> | |||
</center> | |||
Aplicamos de nuevo los teoremas T.C.M. and T.M.C. para encontrar ecuaciones para | |||
estas incógnitas. En realidad, lo único que cambia en el problema es la | |||
aplicación del T.C.M., Como la fuerza <math>\vec{F}_A</math> está aplicada en | |||
<math>A</math>, no ejerce momento respecto a ese punto, y la aplicación del | |||
T.M.C. no cambia. En el T.C.M. sólo hay que añadir un término en la componente | |||
<math>X</math>. Imponemos ademas las consecuencias de la ligadura sobre el | |||
desplazamiento de <math>A</math> | |||
<center> | |||
<math> | |||
s(t) = v_0t, \qquad \dot{s}=v_0, \qquad \ddot{s}=0 | |||
</math> | |||
</center> | |||
Hemos usado que <math>s(0)=0</math> para obtener la primera expresión. El T.C.M. | |||
ahora es | |||
<center> | |||
<math> | |||
\dot{\vec{C}} = \vec{P} + \vec{F}_k + \vec{N}_A + \vec{F}_A | |||
</math> | |||
</center> | |||
Cada componente nos da una ecuación | |||
<center> | |||
<math> | |||
\begin{array}{llr} | |||
(X): & F_A = a\ddot{\theta}\,\mathrm{sen}\,\theta +a\dot{\theta}^2\cos\theta | |||
-\dfrac{k}{m}(v_0t-d) & (4) | |||
\\ | |||
&&\\ | |||
(Y): & N = mg + m(a\ddot{\theta}\cos\theta - | |||
a\ddot{\theta}^2\,\mathrm{sen}\,\theta) & (5) | |||
\end{array} | |||
</math> | |||
</center> | |||
El T.M.C. nos da la ecuación de movimiento para <math>\theta</math> | |||
<center> | |||
<math> | |||
\ddot{\theta} | |||
= | |||
-\dfrac{mga}{I+ma^2}\cos\theta | |||
\qquad (6) | |||
</math> | |||
</center> | |||
Puede sustituirse el valor <math>\ddot{\theta}</math> dado por (6) en la | |||
ecuación (4) | |||
[[Categoría:Problemas de Dinámica Vectorial del Sólido Rígido]] | |||
[[Categoría:Problemas de examen de Mecánica Racional]] | |||
Revisión actual - 11:14 3 nov 2023
Enunciado

Una barra de longitud y masa (sólido "2") desliza con un extremo (punto ) apoyado sobre un plano horizontal liso. El extremo está unido a un muelle de constante elástica k y longitud natural nula anclado en que se mantiene siempre horizontal. La gravedad actúa verticalmente hacia abajo. En la barra estaba en reposo, el punto coincidía con y la barra estaba completamente vertical.






- Encuentra la expresión que da la cantidad de movimiento de la barra.
- Encuentra la expresión que da el momento cinético de la barra respecto del punto .
- Determina las ecuaciones de movimiento del sistema.
- ¿Cómo es la fuerza de ligadura en el punto ?
- Supongamos que se fuerza al punto a moverse con velocidad uniforme . ¿Cual de estas fuerzas aplicadas en consigue ese efecto?

Solución
Cantidad de movimiento
Vamos a determinar la reducción cinemática de la barra. Al ser un movimiento plano, y dado que el eje forma un ángulo con el eje fijo , el vector rotación es




Por otro lado, la velocidad absoluta del punto de la barra es

Ahora calculamos la velocidad en el centro de masas de la barra

Como

tenemos

y la cantidad de movimiento de la barra es

Momento cinético en
Calculamos primero el momento cinético en el centro de masas de la barra. El ser un movimiento plano, el momento cinético y el vector rotación son paralelos. La relación entre ellos es

Aquí, es el momento de inercia de la barra respecto a un eje perpendicular a ella que pase por el centro de masas:


Entonces el momento cinético en el centro de masas es

No ponemos subíndice en el vector pues, en un movimiento plano, es el mismo para todos los sólidos.

Calculamos ahora el momento cinético en usando la ecuación del campo de momentos cinéticos

Haciendo el cálculo tenemos

Ecuaciones de movimiento del sistema

Vamos a usar los métodos de la Dinámica Vectorial. Primero dibujamos el diagrama de fuerzas y momentos que actúan sobre la barra. La única ligadura que actúa, (aparte del hecho de que el movimiento es plano) es la que impone que el punto de la barra no puede penetrar en el suelo. Por tanto hay que introducir una fuerza de ligadura en con componente vertical no nula. Por otro lado, hay dos fuerzas activas actuando sobre la barra: el peso, aplicado en , y la fuerza que ejerce el muelle en . Expresamos estas fuerzas en la base "1"


T.C.M.
El Teorema de la Cantidad de Movimiento nos dice

Para calcular la derivada de la cantidad de movimiento, calculamos primero la derivada temporal de la reducción cinemática en

Ahora usamos la ecuación del campo de aceleraciones para calcular la aceleración absoluta del centro de masas de la barra

Esta aceleración también puede calcularse derivando respecto al tiempo la expresión de . La derivada temporal de la cantidad de movimiento es


Cada componente del T.C.M. nos da una ecuación diferencial

T.M.C.
Vamos a aplicar el Teorema del Momento Cinético en el punto , pues así sólo el peso interviene en el momento neto de las fuerzas. El punto es móvil, por lo que el teorema se escribe

La derivada del momento cinético es

Sólo el peso ejerce momento

El término que falta es

Por tanto, la ecuación que obtenemos del T.M.C. es

Las ecuaciones (1) y (3) son ecuaciones diferenciales para los grados de libertad . La ecuación (2) nos da el valor de la fuerza de ligadura

Fuerza de ligadura en
Usando la ecuación (2) tenemos

Movimiento de restingido
Para imponer el movimiento del punto hay que aplicar una fuerza de ligadura extra, pues lo que se impone es una traslación restringida. Esta fuerza es de la forma

Este vínculo disminuye en 1 el número de grados de libertad. Las incógnitas ahora son

Aplicamos de nuevo los teoremas T.C.M. and T.M.C. para encontrar ecuaciones para estas incógnitas. En realidad, lo único que cambia en el problema es la aplicación del T.C.M., Como la fuerza está aplicada en , no ejerce momento respecto a ese punto, y la aplicación del T.M.C. no cambia. En el T.C.M. sólo hay que añadir un término en la componente . Imponemos ademas las consecuencias de la ligadura sobre el desplazamiento de



Hemos usado que para obtener la primera expresión. El T.C.M. ahora es


Cada componente nos da una ecuación

El T.M.C. nos da la ecuación de movimiento para

Puede sustituirse el valor dado por (6) en la ecuación (4)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Historial del archivo
Haz clic sobre una fecha y hora para ver el archivo tal como apareció en ese momento.
| Fecha y hora | Miniatura | Dimensiones | Usuario | Comentario | |
|---|---|---|---|---|---|
| actual | 11:14 3 nov 2023 | 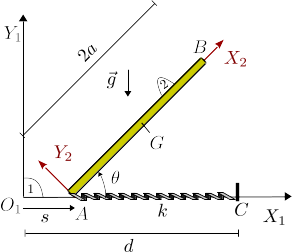 | 292 × 252 (27 kB) | Pedro (discusión | contribs.) |
No puedes sobrescribir este archivo.
Usos del archivo
Las siguientes páginas usan este archivo:
{kind=link}
{kind=link}
{kind=link}
{kind=link}