|
|
| Línea 1: |
Línea 1: |
| <!--
| |
| ==Enunciado del primer problema==
| |
| -->
| |
| ==Enunciado== | | ==Enunciado== |
| Un rodillo de radio <math>R=60\,\mathrm{cm}</math> (sólido “0”) rueda sin deslizar sobre un suelo horizontal “1” de forma que su centro C avanza con una celeridad constante <math>v_0=30\,\mathrm{cm}/\mathrm{s}</math> respecto al suelo. En su marcha, este rodillo empuja a un segundo rodillo de radio <math>r=15\,\mathrm{cm}</math> (sólido “2”), que se ve obligado a rodar sin deslizar sobre el mismo suelo, manteniéndose tangente al primer rodillo (ver figura).
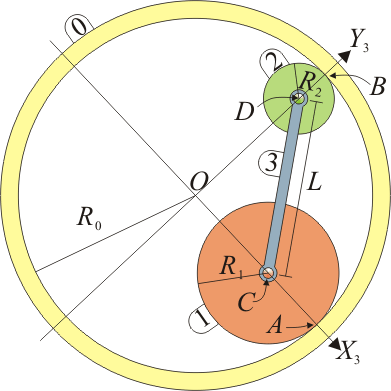
| | Se tiene el sistema de la figura, formado por dos discos “1” y “2” de radios <math>R_1=40\,\mathrm{cm}</math> y <math>R_2=20\,\mathrm{cm}</math> cuyos centros, C y D, están unidos por una barra rígida “3” de longitud <math>L=100\,\mathrm{cm}</math>. Las dos ruedas del artilugio ruedan sin deslizar por la superficie interior de un aro “0” de radio <math>R_0=100\,\mathrm{cm}</math>, siendo A y B los respectivos puntos de contacto. El centro del disco “1” gira con velocidad angular constante <math>\omega_{30}=1.50\,\mathrm{rad}/\mathrm{s}</math> en sentido antihorario respecto al aro exterior “0”. |
|
| |
|
| # Calcule las velocidades angulares <math>\vec{\omega}_{21}</math>, <math>\vec{\omega}_{01}</math> y <math>\vec{\omega}_{20}</math>. | | # Determine las cinco velocidades angulares relativas restantes. |
| # Halle la velocidad relativa de deslizamiento en el punto A de contacto entre los dos sólidos <math>\vec{v}^A_{20}</math>. ¿Cuál es la rapidez de este deslizamiento? | | # Localice los seis centros instantáneos de rotación. |
| # Determine la posición del centro instantáneo de rotación <math>I_{20}</math> por los procedimientos siguientes: (i) analíticamente (con ayuda del resultado del apartado anterior); (ii) gráficamente.
| |
| <!--
| |
| (sugerencia: introduzca previamente un cuarto sólido consistente en una varilla BC articulada a los centros de ambos rodillos).
| |
| -->
| |
|
| |
|
| <center>[[Archivo:dos-rodillos-01.png]]</center> | | '''Sugerencia:''' Emplee el sistema de ejes ligado al sólido “3” de la figura, tal que el eje <math>OX_3</math> pasa por el centro del disco “1”. |
|
| |
|
| <!-- | | <center>[[Archivo:dos-discos-aro.png]]</center> |
| ==Enunciado del segundo problema==
| |
| Suponga que en la configuración del problema anterior de dos rodillos el rozamiento del cilindro “2” con el “0” es mayor que con el suelo, de manera que el rodillo “2” debe rodar sin deslizar sobre el cilindro “0” (y rodar y deslizar sobre el suelo). Halle, para ese caso, la velocidad angular <math>\vec{\omega}_{21}</math>, la velocidad de deslizamiento del rodillo “2” sobre el suelo <math>\vec{v}^D_{21}</math> y la posición del CIR <math>I_{21}</math>.
| |
|
| |
|
| ==Introducción== | | ==Velocidad angulares== |
| Se incluyen aquí las soluciones de dos problemas diferentes pero que comparten geometría y algunas propiedades cinemáticas. Dado que la solución del segundo requiere algunos valores ya calculados en el primero, se pone su solución a continuación de la del primero, para aprovechar esos resultados comunes. Conviene, no obstante, tener clara la diferencia:
| | ===Movimiento {30}=== |
| | El enunciado nos da la velocidad angular con la que gira el punto C, centro del disco <math>1</math> alrededor del centro del aro “0”. Este punto pertenece tanto al sólido “1” como al “3” por tratarse de la articulación de la barra con el disco. Esta velocidad angular es la que posee toda la barra “3” en su rotación alrededor de O. Por eso, los subíndices del dato se refieren al movimiento {30} (y no al {10} ya que como veremos, el disco 1 posee una velocidad angular diferente): |
|
| |
|
| * En el primer problema tenemos dos rodillos que ruedan, sin deslizar, por el suelo, produciéndose un deslizamiento de uno sobre el otro.
| | <center><math>\omega_{30}=1.50\frac{\mathrm{m}}{\mathrm{s}}</math></center> |
| * En el segundo, el primer rodillo se mueve de la misma manera, pero el segundo rueda sobre éste, y desliza sobre el suelo.
| |
|
| |
|
| ==Solución del primer problema==
| | ===Movimiento {10}=== |
| -->
| | Para hallar la velocidad angular observamos que este movimiento es una rotación alrededor del punto de contacto, A, y por tanto la velocidad del centro del disco “1” en este movimiento es |
| ==Solución==
| |
| ===Velocidades angulares===
| |
| ====Movimiento {01}====
| |
| El movimiento {01} es uno de rodadura sin deslizamiento alrededor del punto O de contacto
| |
| del rodillo 0 con el suelo 1. La velocidad del punto C en este movimiento es igual a | |
|
| |
|
| <center><math>\vec{v}^C_{01}=\vec{\omega}_{01}\times\overrightarrow{OC}</math></center> | | <center><math>\vec{v}^C_{10}=\omega_{10}\vec{k}\times\overrightarrow{AC}</math></center> |
|
| |
|
| donde
| | Por otro lado tenemos que la velocidad de C, considerado como parte de “3”, es una rotación alrededor de O |
|
| |
|
| <center><math>\vec{v}^C_{01}=v_0\vec{\imath}</math>{{qquad}}{{qquad}}<math>\vec{\omega}_{01}=\omega_{01}\vec{k}</math>{{qquad}}{{qquad}}<math>\overrightarrow{OC}=R\vec{\jmath}</math></center> | | <center><math>\vec{v}^C_{10}=\vec{v}^C_{13}+\vec{v}^C_{30}=\vec{0}+\omega_{30}\vec{k}\times\overrightarrow{OC}</math></center> |
|
| |
|
| Sustituyendo en la expresión anterior
| | Igualando ambas velocidades llegamos a la relación |
|
| |
|
| <center><math>v_0\vec{\imath}=(\omega_{01}\vec{k})\times(R\vec{\jmath})=-\omega_{01}R\vec{\imath}</math></center> | | <center><math>\omega_{10}\overrightarrow{AC}=\omega_{30}\overrightarrow{OC}</math></center> |
|
| |
|
| de donde | | Los vectores de posición relativos valen, en el sistema de referencia indicado: |
|
| |
|
| <center><math>\omega_{01}=-\frac{v_0}{R}=-\frac{30\,\mathrm{cm}/\mathrm{s}}{60\,\mathrm{cm}}= | | <center><math>\overrightarrow{OC}=(R_0-R_1)\vec{\imath}_3=60\vec{\imath}_3\,\mathrm{cm}</math>{{qquad}}{{qquad}}<math>\overrightarrow{AC}=-R_1\vec{\imath}_3=-40\,\vec{\imath}_3\,\mathrm{cm}</math></center> |
| -0.5\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> | |
|
| |
|
| ====Movimiento {21}====
| | De aquí obtenemos la velocidad angular |
| Al ser empujado por el rodillo 0, el centro del rodillo 2 se ve forzado a avanzar con la
| |
| misma rapidez, de forma que
| |
|
| |
|
| <center><math>\vec{v}^B_{21}=v_0\vec{\imath}</math></center> | | <center><math>\omega_{10}=-\frac{60}{40}1.50\,\frac{\mathrm{rad}}{\mathrm{s}}=-2.25\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> |
|
| |
|
| Al rodar sin deslizar sobre la superficie horizontal, el rodillo 2 efectúa un movimiento
| | ===Movimiento {31}=== |
| {21} de rotación en torno al punto D de contacto del rodillo con el suelo. Operando del | | La velocidad angular del movimiento {31} es inmediata por aplicación de la ley de composición correspondiente |
| mismo modo que en el caso anterior obtenemos
| |
|
| |
|
| <center><math>\omega_{21}=-\frac{v_0}{r} = -2.0\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> | | <center><math>\omega_{31}=\omega_{30}+\omega_{01}=\omega_{30}-\omega_{10}=1.50\,\frac{\mathrm{rad}}{\mathrm{s}}-\left(-2.25\,\frac{\mathrm{rad}}{\mathrm{s}}\right)=3.75\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> |
|
| |
|
| ====Movimiento {20}====
| | ===Movimiento {20}=== |
| La velocidad angular con la que un rodillo gira respecto al otro la obtenemos aplicando
| | El punto D, centro del disco “2” también gira alrededor de O con la misma velocidad angular que C. Considerado como parte del sólido “3” su velocidad lineal es |
| la ley de composición de las velocidades angulares
| |
|
| |
|
| <center><math>\omega_{20}=\omega_{21}+\omega_{10}=\omega_{21}-\omega_{01}=-1.5\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> | | <center><math>\vec{v}^D_{30}=\omega_{30}\vec{k}\times\overrightarrow{OD}</math></center> |
|
| |
|
| ===Velocidad de deslizamiento===
| | mientras que, considerado como parte del disco “2” realiza una rotación instantánea alrededor del punto B, de contacto del disco con el aro. |
| El contacto entre los dos rodillos no es solo de rodadura, sino también de deslizamiento. En el punto en que son tangentes, el punto A del rodillo 0 se está moviendo hacia abajo, mientras que el punto A del rodillo 2 lo hace hacia arriba, con lo que existe una cierta velocidad relativa. El valor de esta velocidad es
| |
|
| |
|
| <center><math>\vec{v}^A_{20} =\vec{v}^A_{21}-\vec{v}^A_{01}</math></center> | | <center><math>\vec{v}^D_{20}=\omega_{20}\vec{k}\times\overrightarrow{BD}</math></center> |
|
| |
|
| La velocidad del punto A en el movimiento {21} es igual a
| | Estas dos velocidades deben ser iguales, ya que |
|
| |
|
| <center><math>\vec{v}^A_{21}=\vec{v}^B_{21}+\vec{\omega}_{21}\times\overrightarrow{BA}</math></center> | | <center><math>\vec{v}^D_{30}=\overbrace{\vec{v}^D_{32}}^{=\vec{0}} + \vec{v}^D_{20}</math></center> |
|
| |
|
| [[Archivo:dos-rodillos-triangulo.png|right]]
| | Sustituyendo, llegamos a la relación |
|
| |
|
| El vector de posición relativo cumple la relación de proporcionalidad
| | <center><math>\omega_{30}\overrightarrow{OD}=\omega_{20}\overrightarrow{BD}</math></center> |
|
| |
|
| <center><math>\overrightarrow{BA}=-\frac{r}{R+r}\overrightarrow{CB}= -\frac{\overrightarrow{CB}}{5.0}</math></center>
| | Aunque para determinar la velocidad angular nos basta con saber que los vectores de posición son proporcionales y de sentido opuesto, vamos a determinar su expresión en el sistema de referencia indicado, ya que ésta puede ser útil más adelante. |
|
| |
|
| siendo el vector de posición relativo entre los ejes de la forma
| | La figura sugiere que los puntos B y D se encuentran sobre el eje <math>OY_3</math>. Sin embargo, no tenemos certeza de tal afirmación. De hecho, para valores arbitrarios de <math>R_1</math>, <math>R_2</math> y <math>L</math> no será cierto en general. Vamos a demostrar que sí ocurre para los datos del enunciado. Para ello, hemos de probar que el ángulo COD es recto. |
|
| |
|
| <center><math>\overrightarrow{CB}=d\vec{\imath}-(R-r)\vec{\jmath}</math></center>
| | En el triángulo OCD los lados valen |
|
| |
|
| La distancia <math>d</math> entre los puntos de contacto la obtenemos por aplicación del
| | <center><math>|\overrightarrow{OC}|=R_0-R_1=60\,\mathrm{cm}</math>{{qquad}}{{qquad}}<math>|\overrightarrow{OD}|=R_0-R_2=80\,\mathrm{cm}</math>{{qquad}}{{qquad}}<math>|\overrightarrow{CD}|=L=100\,\mathrm{cm}</math></center> |
| teorema de Pitágoras
| |
|
| |
|
| <center><math>d^2+(R-r)^2 = (R+r)^2\,</math>{{tose}}<math>d=2\sqrt{Rr}=60\,\mathrm{cm}</math></center>
| | Aplicando el teorema del coseno tenemos que si <math>\gamma</math> es el ángulo en O |
|
| |
|
| lo que nos da
| | <center><math>\cos(\gamma)=\frac{|\overrightarrow{OC}|^2+|\overrightarrow{OD}|^2-|\overrightarrow{CD}|^2}{2|\overrightarrow{OC}||\overrightarrow{OD}|}=\frac{60^2+80^2-100^2}{2\cdot 60\cdot 80}=0</math></center> |
|
| |
|
| <center><math>\overrightarrow{BA}=(-12\vec{\imath}+9\vec{\jmath})\,\mathrm{cm}</math></center>
| | Por tanto el ángulo es efectivamente recto y los vectores de posición relativos son |
|
| |
|
| y la velocidad
| | <center><math>\overrightarrow{OD}=80\,\vec{\jmath}_3\,\mathrm{cm}</math>{{qquad}}{{qquad}}<math>\overrightarrow{BD}=-20\vec{\jmath}_3\,\mathrm{cm}</math></center> |
|
| |
|
| <center><math>\vec{v}^A_{21}=\left(30\vec{\imath}+
| | y la velocidad angular del movimiento {20} valen |
| (-2.0\vec{k})\times(-12\vec{\imath}+9\vec{\jmath})\right)\frac{\mathrm{cm}}{\mathrm{s}}=
| |
| \left(48\vec{\imath}+24\vec{\jmath}\right)\frac{\mathrm{cm}}{\mathrm{s}}
| |
| </math></center>
| |
|
| |
|
| Esta velocidad puede también hallarse reduciendo en el punto D, que es el CIR
| | <center><math>\omega_{20}=-\frac{80}{20}1.50\,\frac{\mathrm{rad}}{\mathrm{s}}=-6.00\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> |
| <math>I_{21}</math> | |
|
| |
|
| <center><math>\vec{v}^A_{21}=\vec{\omega}_{21}\times\overrightarrow{DA}</math></center>
| | ===Movimiento {32}=== |
| | De nuevo empleamos la ley de composición de velocidades angulares para hallar la del movimiento {32} |
|
| |
|
| donde
| | <center><math>\omega_{32}=\omega_{30}+\omega_{02}=\omega_{30}-\omega_{20}=7.50\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> |
|
| |
|
| <center><math>\overrightarrow{DA}=\overrightarrow{DB}+\overrightarrow{BA}=
| | ===Movimiento {21}=== |
| (-12\vec{\imath}+24\vec{\jmath})\,\mathrm{cm}
| | Por último, para hallar la velocidad angular con la que gira un disco respecto al otro empleamos de nuevo la ley de composición de velocidades empleando el aro “0” como sólido intermedio |
| </math></center>
| |
|
| |
|
| La velocidad en el movimiento {01} se calcula de manera similar. Reduciendo en el centro
| | <center><math>\omega_{21}=\omega_{20}+\omega_{01}=\omega_{20}-\omega_{10}=\left(-6.00+2.25\right)\,\frac{\mathrm{rad}}{\mathrm{s}}=-3.75\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> |
| del rodillo 0
| |
|
| |
|
| <center><math>\vec{v}^A_{01}=\vec{v}^C_{01}+\vec{\omega}_{01}\times\overrightarrow{CA}</math></center>
| | Alternativamente, podemos emplear la barra “3” como sólido intermedio |
|
| |
|
| siendo ahora el vector de posición relativo
| | <center><math>\omega_{21}=\omega_{23}+\omega_{31}=-\omega_{32}+\omega_{31}=\left(-7.50+3.75\right)\,\frac{\mathrm{rad}}{\mathrm{s}}=-3.75\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center> |
|
| |
|
| <center><math>\overrightarrow{CA}=\frac{R}{R+r}\overrightarrow{CB}=
| | ==Centros instantáneos de rotación== |
| (48\vec{\imath}-36\vec{\jmath})\,\mathrm{cm}</math></center>
| | La mayoría de los centros instantáneos de rotación son inmediatos. De hecho, todos menos uno. |
|
| |
|
| lo que resulta en la velocidad
| | ;Movimiento {30}: El movimiento de la barra “3” respecto al aro “0” es una rotación alrededor del centro de éste. Por tanto |
|
| |
|
| <center><math>\vec{v}^A_{01}=\left(30\vec{\imath}+ | | <center><math>I_{30}=O\,</math></center> |
| (-0.5\vec{k})\times(48\vec{\imath}-36\vec{\jmath})\right)\frac{\mathrm{cm}}{\mathrm{s}}=
| |
| \left(12\vec{\imath}-24\vec{\jmath}\right)\frac{\mathrm{cm}}{\mathrm{s}}
| |
| </math></center> | |
|
| |
|
| Esta velocidad también puede calcularse como
| | :En forma vectorial |
|
| |
|
| <center><math>\vec{v}^A_{01}=\vec{\omega}_{01}\times\overrightarrow{OA}</math></center> | | <center><math>\overrightarrow{OI}_{30}=\vec{0}</math></center> |
|
| |
|
| La velocidad de deslizamiento es la diferencia entre estas dos velocidades
| | ;Movimiento {13}: Respecto de la barra “3”, el disco “1” realiza una rotación alrededor de su centro, por lo que |
|
| |
|
| <center><math>\vec{v}^A_{20}=\vec{v}^A_{21}-\vec{v}^A_{01} = | | <center><math>I_{31}=C\,</math></center> |
| \left(36\vec{\imath}+48\vec{\jmath}\right)\frac{\mathrm{cm}}{\mathrm{s}}
| |
| </math></center> | |
|
| |
|
| Esta velocidad relativa es tangente a la superficie de contacto y tiene por módulo
| | :En forma vectorial |
|
| |
|
| <center><math>v^A_{20}=\sqrt{36^2+48^2}\frac{\mathrm{cm}}{\mathrm{s}}=60\frac{\mathrm{cm}}{\mathrm{s}} | | <center><math>\overrightarrow{OI}_{31}=60\,\vec{\imath}_3\,\mathrm{cm}</math></center> |
| </math></center> | |
|
| |
|
| [[Archivo:dos-rodillos-solido3.png|right]]
| | ;Movimiento {23}: Análogamente, el disco “2” ejecuta, respecto de la barra “3”, una rotación alrededor de su centro: |
|
| |
|
| El que resulte el doble de la velocidad de avance de los rodillos no es casual ni dependiente de las dimensiones concretas de estos. Podemos demostrarlo de forma sencilla:
| | <center><math>I_{32}=D\,</math></center> |
|
| |
|
| Observemos que los centros C y B se encuentran en todo momento a la misma distancia entre ellos, <math>R+r</math>. Por tanto, podemos imaginarnos un cuarto sólido, “3”, formado por una barra que une los dos centros. ¿Cómo son los diferentes movimientos respecto a esta barra?
| | :En forma vectorial |
|
| |
|
| * El sólido “1” el suelo se mueve hacia atrás con rapidez <math>v_0</math>.
| | <center><math>\overrightarrow{OI}_{32}=80\,\vec{\jmath}_3\,\mathrm{cm}</math></center> |
| * El disco “0” gira alrededor de su centro C con una velocidad angular tal que el punto O se mueve hacia atrás con celeridad <math>v_0</math>.
| |
| * El disco “2” gira alrededor de su centro B con una velocidad angular tal que el punto D se mueve hacia atrás con celeridad <math>v_0</math>.
| |
|
| |
|
| La velocidad de deslizamiento en A será la diferencia
| | ;Movimiento {10}: Dado que el contacto entre el disco 1 y el aro 0 implica rodadura sin deslizamiento, el CIR del movimiento es el punto de contacto |
|
| |
|
| <center><math>\vec{v}^A_{20}=\vec{v}^A_{23} -\vec{v}^A_{03}</math></center> | | <center><math>I_{10}=A\,</math></center> |
|
| |
|
| Ahora bien, en estos dos movimientos de rotación las velocidades de A son tangentes a la línea de contacto entre discos, las dos tienen módulo <math>v_0</math> y poseen sentidos opuestos. Por tanto, su diferencia será un vector también tangente y de módulo <math>v_0-(-v_0) = 2v_0</math>. Este resultado es independiente de los radios de los discos.
| | :En forma vectorial |
|
| |
|
| ===Centro instantáneo de rotación===
| | <center><math>\overrightarrow{OI}_{10}=100\,\vec{\imath}_3\,\mathrm{cm}</math></center> |
| ====Método analítico====
| |
| La posición del CIR <math>I_{20}</math> puede obtenerse analíticamente conocida la
| |
| velocidad de un punto y la velocidad angular. La posición del CIR respecto al punto A es
| |
|
| |
|
| <center><math>\overrightarrow{AI}_{20}=\frac{\vec{k}\times\vec{v}^A_{20}}{\omega_{20}}=
| | ;Movimiento {20}: El disco “2” también realiza, respecto del aro “0”, una rotación instantánea alrededor del punto de contacto, por lo que |
| \frac{\vec{k}\times\left(36\vec{\imath}+48\vec{\jmath}\right)}{-1.5}\,\mathrm{cm}=
| |
| \left(32\vec{\imath}-24\vec{\jmath}\right)\mathrm{cm}</math></center>
| |
|
| |
|
| y respecto al punto O
| | <center><math>I_{20}=B\,</math></center> |
|
| |
|
| <center><math>\overrightarrow{OI}_{20}=\overrightarrow{OA}+\overrightarrow{AI}_{20}
| | :En forma vectorial |
| =80\vec{\imath}\,\mathrm{cm}</math></center>
| |
|
| |
|
| ====Métodos geométricos==== | | <center><math>\overrightarrow{OI}_{20}=100\,\vec{\jmath}_3\,\mathrm{cm}</math></center> |
| [[Archivo:dos-rodillos-cir.png|right]]
| |
|
| |
|
| Geométricamente, podemos determinar la posición del CIR {20} de diferentes formas.
| | ;Movimiento {21}: Este es el único que no es evidente. Podemos hallar este punto analítica y gráficamente. Para calcularlo de manera analítica precisamos la velocidad de un punto. Si queremos la posición respecto al punto O, la fórmula correspondiente es |
|
| |
|
| Una posibilidad consiste en hallar en primer lugar la velocidad de un segundo punto, en
| | <center><math>\overrightarrow{OI}_{21}=\frac{\vec{k}\times\vec{v}^O_{21}}{\omega_{21}}</math></center> |
| adición del que ya conocemos. Si consideramos la velocidad del punto O en el movimiento
| |
| {20} obtenemos | |
|
| |
|
| <center><math>\vec{v}^O_{20}=\vec{v}^O_{21}+\overbrace{\vec{v}^O_{10}}^{=\vec{0}}=
| | :Necesitamos la velocidad del punto O en el movimiento {21}. La obtenemos aplicando la fórmula de composición de velocidades. Los movimientos {20} y {10} son rotaciones instantáneas alrededor de los puntos B y A por lo que |
| \vec{\omega}_{21}\times\overrightarrow{DO}</math></center>
| |
|
| |
|
| La velocidad de arrastre se anula por ser O el CIR del movimiento {10}. La segunda
| | <center><math>\vec{v}^O_{21}=\vec{v}^O_{20}-\vec{v}^O_{10}=\omega_{20}\vec{k}\times\overrightarrow{BO}-\omega_{10}\vec{k}\times\overrightarrow{AO}</math></center> |
| expresión nos dice que la velocidad de O en el movimiento {20} es perpendicular a la
| |
| recta que pasa por D y O.
| |
|
| |
|
| El CIR <math>I_{20}</math> se encuentra entonces en la intersección de la recta
| | :Sustituyendo los valores numéricos |
| horizontal, que pasa por D y O, con la recta que une los centros C y B (perpendicular a
| |
| la velocidad de deslizamiento en A).
| |
|
| |
|
| Alternativamente, podemos observar que la distancia entre B y C permanece constante en
| | <center><math>\vec{v}^O_{21}=\left(-6.00\vec{k}\frac{\mathrm{rad}}{\mathrm{s}}\right)\times(-100\,\vec{\jmath}_3\,\mathrm{cm})-\left(-2.25\vec{k}\frac{\mathrm{rad}}{\mathrm{s}}\right)\times(-100\,\vec{\imath}_3\,\mathrm{cm})=\left(-600\,\vec{\imath}_3-225\,\vec{\jmath}_3\right)\,\frac{\mathrm{cm}}{\mathrm{s}}</math></center> |
| todo momento, por lo que podemos imaginar un cuarto sólido 3, que une estos dos centros
| |
| (una barra, por ejemplo). Los movimientos de los dos rodillos respecto al sólido 3 son | |
| rotaciones alrededor de los respectivos ejes B y C.
| |
|
| |
|
| Aplicando ahora el teorema de los tres centros tenemos que el CIR <math>I_{20}</math> debe estar en la
| | :Llevando esto a la expresión analítica del CIR nos queda |
| intersección de la recta que pasa por <math>I_{01} (O)</math> e <math>I_{21}</math> (D), con la recta que pasa por
| |
| <math>I_{03}</math> (C) e <math>I_{23}</math> (B), llegándose al resultado ya conocido.
| |
|
| |
|
| Otra forma consiste en, si no se ha calculado la velocidad de deslizamiento en A, buscar
| | <center><math>\overrightarrow{OI}_{21}=\frac{\vec{k}\times\left(-600\,\vec{\imath}_3-225\,\vec{\jmath}_3\right)}{-3.75}\,\mathrm{cm}=\left(-60\vec{\imath}_3+160\vec{\jmath}_3\right)\mathrm{cm}</math></center> |
| otro punto cuya velocidad {20} sea fácil de calcular. El más simple es D, para el que
| |
| tenemos
| |
|
| |
|
| <center><math>\vec{v}^D_{20}=\overbrace{\vec{v}^D_{21}}^{=\vec{0}}-\vec{v}^D_{01}=
| | También podemos hallar este CIr empleando la fórmula |
| -\vec{\omega}_{01}\times\overrightarrow{OD}</math></center>
| |
|
| |
|
| Sustituyendo los valores numéricos queda
| | <center><math>\overrightarrow{OI}_{21}=\frac{\omega_{20}\overrightarrow{OI}_{20}+\omega_{01}\overrightarrow{OI}_{01}}{\omega_{20}+\omega_{01}}</math></center> |
|
| |
|
| <center><math>\vec{v}^D_{20}= \frac{v_0d}{R}\vec{\jmath}=30\vec{\jmath}\,\frac{\mathrm{cm}}{\mathrm{s}}</math></center>
| | que para este caso nos da |
|
| |
|
| Que junto con el resultado anterior
| | <center><math>\overrightarrow{OI}_{21}=\frac{-6.00(100\vec{\jmath}_3)+2.25(100\vec{\imath}_3)}{-6.00+2.25}\,\mathrm{cm}=\left(-60\vec{\imath}_3+160\vec{\jmath}_3\right)\mathrm{cm}</math></center> |
|
| |
|
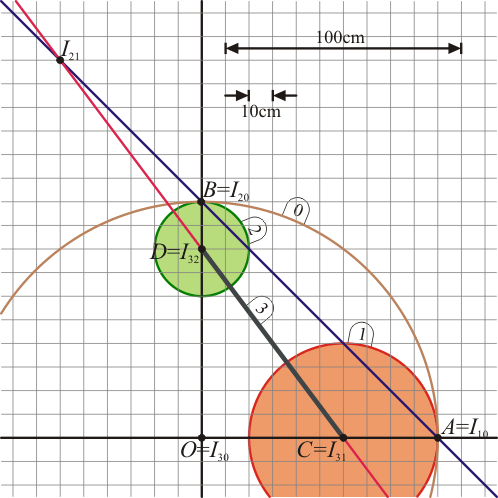
| <center><math>\vec{v}^O_{20}= | | Alternativamente, este CIR puede obtenerse gráficamente. Por el teorema de los tres centros, el CIR <math>I_{21}</math> se encuentra alineado con los dos centros <math>I_{20}</math> e <math>I_{10}</math>. Por tanto, se encuentra sobre una recta que pasa por A y B. Asimismo, se encuentra alineado con los centros <math>I_{32}</math> e <math>I_{31}</math>. Por ello, pertenece también a la recta que pasa por C y D. El CIR buscado se encuentra entonces en la intersección de estas dos rectas, la que pasa por AB y la que pasa por C y D. |
| \vec{\omega}_{21}\times\overrightarrow{DO}=
| |
| \frac{v_0d}{r}\vec{\jmath}=120\vec{\jmath}\,\frac{\mathrm{cm}}{\mathrm{s}}</math></center>
| |
|
| |
|
| permite aplicar el método geométrico de determinación del CIR para el caso de que
| | Algebraicamente, esto se expresa observando que el vector <math>\overrightarrow{CI}</math> debe ser proporcional al <math>\overrightarrow{CD}</math> |
| tengamos dos velocidades paralelas.
| |
|
| |
|
| También puede hallarse gráficamente con ayuda del sólido “3” introducido en el apartado anterior. Según hemos dicho, por el teorema de los tres centros, el CIR <math>I_{20}</math> debe estar en la intersección de la recta que pasa por <math>I_{01} (O)</math> e <math>I_{21}</math> (D). Además debe estar sobre la recta que pasa por el CIR <math>I_{03}</math> (que es el centro del rodillo “0”, C) y con el CIR <math>I_{23}</math> (que es el centro B del rodillo “2”). De nuevo llegamos a que debe estar en la intersección de la recta que pasa por O y D con la que pasa por B y C.
| | <center><math>\overrightarrow{CI}_{21}=\lambda\overrightarrow{CD}=\lambda\left(-60\vec{\imath}_3+80\vec{\jmath}_3\right)\,\mathrm{cm}</math></center> |
| <!--
| |
| ==Solución del segundo problema==
| |
| ===Velocidad angular===
| |
| Para hallar la velocidad angular aplicamos la expresión del campo velocidades de un sólido, reduciendo en el punto de contacto A
| |
|
| |
|
| <center><math>\vec{v}^B_{21}=\vec{v}^A_{21}+\vec{\omega}_{21}\times\overrightarrow{AB}</math></center>
| | y el <math>\overrightarrow{AI}_{21}</math> al <math>\overrightarrow{AB}</math> |
|
| |
|
| El primer miembro es conocido por la geometría del problema, ya que el centro del rodillo “2” se mueve con la misma velocidad que el del rodillo “0”
| | <center><math>\overrightarrow{AI}_{21}\times\overrightarrow{AB}=\vec{0}</math></center> |
|
| |
|
| <center><math>\vec{v}^B_{21}=v_0\vec{\imath}=30\vec{\imath}\,\frac{\mathrm{cm}}{\mathrm{s}}</math></center>
| | Sustituyendo tenemos |
|
| |
|
| La velocidad de A en el movimiento {21} la obtenemos aplicando la ley de composición de velocidades correspondiente
| | <center><math>\overrightarrow{AI}_{21}=\overrightarrow{AC}+\overrightarrow{CI}_{21}=\left((-40-60\lambda)\vec{\imath}_3+80\lambda\vec{\jmath}_3\right)\mathrm{cm}</math></center> |
|
| |
|
| <center><math>\vec{v}^A_{21}=\overbrace{\vec{v}^A_{20}}^{=\vec{0}} + \vec{v}^A_{01}</math></center>
| | Hallamos el producto vectorial y lo igualamos a cero |
|
| |
|
| donde la primera velocidad se anula, por ser el contacto entre los dos sólidos “2” y “0” una rodadura sin deslizamiento. La velocidad de A en el movimiento {01} es la misma que en el problema anterior de dos rodillos ya que el movimiento {01} es el mismo en ambos casos
| | <center><math>\vec{0}=\overrightarrow{AI}_{21}\times\overrightarrow{AB}=\left|\begin{matrix}\vec{\imath}_3 & \vec{\jmath}_3 & \vec{k} \\ |
| | -40-60\lambda & 80\lambda & 0 \\ -100 & 100 & 0\end{matrix}\right|\,\mathrm{cm}^2 = 100(-40+20\lambda)\vec{k}\,\mathrm{cm}^2</math></center> |
|
| |
|
| <center><math>\vec{v}^A_{21}=\left(12\vec{\imath}-24\vec{\jmath}\right)\frac{\mathrm{cm}}{\mathrm{s}}</math></center>
| | de donde |
| | |
| El vector de posición relativo también se determina en ese problema
| |
| | |
| <center><math>\overrightarrow{AB}=(12\vec{\imath}-9\vec{\jmath})\,\mathrm{cm}</math></center>
| |
| | |
| [[Archivo:dos-rodillos-solido3b.png|right]]
| |
| | |
| Llevando esto a la fórmula para la velocidad de B obtenemos
| |
| | |
| <center><math>30\vec{\imath}\,\frac{\mathrm{cm}}{\mathrm{s}}=\left(12\vec{\imath}-24\vec{\jmath}\right)\frac{\mathrm{cm}}{\mathrm{s}}+
| |
| \omega_{21}\vec{k}\times(12\vec{\imath}-9\vec{\jmath})\,\mathrm{cm}=\left(12\frac{\mathrm{cm}}{\mathrm{s}}+9\omega_{21}\,\mathrm{cm}\right)\vec{\imath}+
| |
| \left(-24\frac{\mathrm{cm}}{\mathrm{s}}+12\omega_{21}\,\mathrm{cm}\right)\vec{\jmath}</math></center>
| |
| | |
| Igualando cualquiera de estas dos componentes obtenemos
| |
| | |
| <center><math>\omega_{21}=2\,\frac{\mathrm{rad}}{\mathrm{s}}</math></center>
| |
| | |
| Esta velocidad angular es la misma que se obtiene en el otro problema, pero con sentido contrario.
| |
| | |
| Para interpretar geométricamente este resultado, recurrimos como en él a un cuarto sólido “3”, en forma de barra que une los centros. Visto desde este sólido, en la situación anterior, resultaba que en el punto de contacto ambos rodillos tenían velocidades iguales en magnitud y dirección, pero de sentido opuesto. En este problema la condición de rodadura impone que la velocidad de los dos rodillos en el punto de contacto debe tener el mismo módulo, dirección y sentido. Esto se consigue invirtiendo el sentido de giro de uno de los rodillos. Por ello, ahora nos resulta la misma velocidad angular que antes, pero con el signo opuesto.
| |
| | |
| ===Velocidad de deslizamiento===
| |
| La figura anterior ya nos da la clave de cuál va a ser la velocidad de deslizamiento con el suelo: <math>2v_0</math> en la dirección de avance de los rodillos.
| |
| | |
| Veámoslo. La velocidad de deslizamiento equivale a
| |
| | |
| <center><math>\vec{v}^D_{21} = \vec{v}^B_{21}+\vec{\omega}_{21}\times\overrightarrow{BD}</math></center>
| |
| | |
| donde las diferentes cantidades valen | |
| | |
| <center><math>\vec{v}^B_{21} = 30\,\vec{\imath}\,\frac{\mathrm{cm}}{\mathrm{s}}</math>{{qquad}}{{qquad}}<math>\vec{\omega}_{21}=2\vec{k}\,\frac{\mathrm{rad}}{\mathrm{s}}</math>{{qquad}}{{qquad}}<math>\overrightarrow{BD}=-r\,\vec{\jmath}=-15\vec{\jmath}\,\mathrm{cm}</math></center>
| |
| | |
| Sustituyendo obtenemos
| |
| | |
| <center><math>\vec{v}^D_{21}=30\,\vec{\imath}\,\frac{\mathrm{cm}}{\mathrm{s}}+\left(2\vec{k}\,\frac{\mathrm{rad}}{\mathrm{s}}\right)\times\left(-15\vec{\jmath}\,\mathrm{cm}\right)=60\vec{\imath}\,\frac{\mathrm{cm}}{\mathrm{s}}</math></center>
| |
| | |
| La interpretación de este resultado es inmediata empleando un sistema ligado al sólido “3”: Desde la barra se ve al suelo moverse hacia atrás con velocidad <math>-v_0</math>. El punto O en que el rodillo 0 toca al suelo tendrá la misma velocidad. El punto A de ambos rodillos se moverá con la misma rapidez, aunque en dirección oblicua. Por tanto, el rodillo “2”, en su punto de contacto con el suelo, se mueve hacia adelante con la misma rapidez <math>v_0</math>. La velocidad de deslizamiento será entonces <math>v_0-(-v_0) = 2v_0</math>.
| |
| | |
| ===Centro instantáneo de rotación===
| |
| ====Método analítico====
| |
| Una vez que tenemos la velocidad de un punto, por ejemplo el D, y la velocidad angular del sólido, podemos hallar analíticamente la posición del CIR según la fórmula
| |
| | |
| <center><math>\overrightarrow{DI}_{21}=\frac{\vec{k}\times\vec{v}^D_{21}}{\omega_{21}}=\frac{\vec{k}\times(60\,\vec{\imath}\,\mathrm{cm}/\mathrm{s}}{2\mathrm{rad}/\mathrm{s}}=30\vec{\jmath}\,\mathrm{cm}</math></center>
| |
|
| |
|
| dado que el radio del rodillo “2” es de 15 cm, este resultado quiere decir que el CIR <math>I_{21}</math> se encuentra en la posición diametralmente opuesta a D, esto es, en el punto más alto del disco. Respecto al origen O, su posición se expresa
| | <center><math>\lambda = 2\,</math>{{tose}}<math>\overrightarrow{CI}_{21}=\left(-120\vec{\imath}_3+160\vec{\jmath}_3\right)\,\mathrm{cm}</math></center> |
|
| |
|
| <center><math>\overrightarrow{OI}_{21}=\overrightarrow{OD}+\overrightarrow{DI}_{21} = \left(60\vec{\imath}+30\vec{\jmath}\right)\mathrm{cm}</math></center>
| | y respecto al centro del aro |
|
| |
|
| ====Método gráfico==== | | <center><math>\overrightarrow{OI}_{21}=\overrightarrow{OC}+\overrightarrow{CI}_{21}=\left(-60\vec{\imath}_3+160\vec{\jmath}_3\right)\,\mathrm{cm}</math></center> |
| [[Archivo:dos-rodillos-cir2.png|right]]
| |
|
| |
|
| Podemos hallar este CIR por varios procedimientos gráficos.
| |
|
| |
|
| Conocemos la velocidad de dos puntos en el movimiento {21}
| | <center>[[Archivo:dos-discos-aro-reticula.png]]</center> |
|
| |
|
| <center><math>\vec{v}^B_{21}=30\,\vec{\imath}\,\frac{\mathrm{cm}}{\mathrm{s}}</math>{{qquad}}{{qquad}}<math>\vec{v}^D_{21}=60\,\vec{\imath}\,\frac{\mathrm{cm}}{\mathrm{s}}</math></center>
| | Igualmente, puede verificarse que se encuentran alineados los centros <math>I_{30}</math>, <math>I_{31}</math> e <math>I_{10}</math>, por un lado (los tres están en el eje <math>OX_3</math>) y los centros <math>I_{30}</math>, <math>I_{32}</math> e <math>I_{20}</math> por otro (sobre el eje <math>OY_3</math>). |
|
| |
|
| Estas dos velocidades son paralelas. Por ello, el CIR se encuentra sobre la recta que pasa por estos dos puntos. Para hallar la posición sobre esta recta trazamos las dos velocidades a escala y unimos sus extremos, llegando al resultado de que el CIR se encuentra en el punto diametralmente opuesto a D.
| | Cuando las discos van avanzando sobre el aro, los seis centros van girando respecto al aro, manteniendo una posición fija respecto al sólido “3”. |
|
| |
|
| Si no conocemos la velocidad de D, pero sí la de B (que es inmediata de la geometría del enunciado), sabemos que el CIR <math>I_{21}</math> se va a encontrar sobre la recta perpendicular a la velocidad de B y que pasa por B. Para hallar la posición sobre esta recta, aplicamos el teorema de los tres centros. El CIR <math>I_{21}</math> debe estar alineado con el <math>I_{01}</math> (que es el punto O de contacto del rodillo “0” con el suelo “1”) y con el <math>I_{20}</math>, que es el punto A de contacto de ambos rodillos. Trazando estas dos rectas llegamos al resultado que ya conocemos.
| |
| -->
| |
| <!-- | | <!-- |
| [[Categoría:Problemas de Movimiento Plano (GITI)]] | | [[Categoría:Problemas de Movimiento Plano (GITI)]] |
| --> | | --> |
Enunciado
Se tiene el sistema de la figura, formado por dos discos “1” y “2” de radios  y
y  cuyos centros, C y D, están unidos por una barra rígida “3” de longitud
cuyos centros, C y D, están unidos por una barra rígida “3” de longitud  . Las dos ruedas del artilugio ruedan sin deslizar por la superficie interior de un aro “0” de radio
. Las dos ruedas del artilugio ruedan sin deslizar por la superficie interior de un aro “0” de radio  , siendo A y B los respectivos puntos de contacto. El centro del disco “1” gira con velocidad angular constante
, siendo A y B los respectivos puntos de contacto. El centro del disco “1” gira con velocidad angular constante  en sentido antihorario respecto al aro exterior “0”.
en sentido antihorario respecto al aro exterior “0”.
- Determine las cinco velocidades angulares relativas restantes.
- Localice los seis centros instantáneos de rotación.
Sugerencia: Emplee el sistema de ejes ligado al sólido “3” de la figura, tal que el eje  pasa por el centro del disco “1”.
pasa por el centro del disco “1”.
Velocidad angulares
Movimiento {30}
El enunciado nos da la velocidad angular con la que gira el punto C, centro del disco  alrededor del centro del aro “0”. Este punto pertenece tanto al sólido “1” como al “3” por tratarse de la articulación de la barra con el disco. Esta velocidad angular es la que posee toda la barra “3” en su rotación alrededor de O. Por eso, los subíndices del dato se refieren al movimiento {30} (y no al {10} ya que como veremos, el disco 1 posee una velocidad angular diferente):
alrededor del centro del aro “0”. Este punto pertenece tanto al sólido “1” como al “3” por tratarse de la articulación de la barra con el disco. Esta velocidad angular es la que posee toda la barra “3” en su rotación alrededor de O. Por eso, los subíndices del dato se refieren al movimiento {30} (y no al {10} ya que como veremos, el disco 1 posee una velocidad angular diferente):

Movimiento {10}
Para hallar la velocidad angular observamos que este movimiento es una rotación alrededor del punto de contacto, A, y por tanto la velocidad del centro del disco “1” en este movimiento es

Por otro lado tenemos que la velocidad de C, considerado como parte de “3”, es una rotación alrededor de O

Igualando ambas velocidades llegamos a la relación

Los vectores de posición relativos valen, en el sistema de referencia indicado:


De aquí obtenemos la velocidad angular

Movimiento {31}
La velocidad angular del movimiento {31} es inmediata por aplicación de la ley de composición correspondiente

Movimiento {20}
El punto D, centro del disco “2” también gira alrededor de O con la misma velocidad angular que C. Considerado como parte del sólido “3” su velocidad lineal es

mientras que, considerado como parte del disco “2” realiza una rotación instantánea alrededor del punto B, de contacto del disco con el aro.

Estas dos velocidades deben ser iguales, ya que

Sustituyendo, llegamos a la relación

Aunque para determinar la velocidad angular nos basta con saber que los vectores de posición son proporcionales y de sentido opuesto, vamos a determinar su expresión en el sistema de referencia indicado, ya que ésta puede ser útil más adelante.
La figura sugiere que los puntos B y D se encuentran sobre el eje  . Sin embargo, no tenemos certeza de tal afirmación. De hecho, para valores arbitrarios de
. Sin embargo, no tenemos certeza de tal afirmación. De hecho, para valores arbitrarios de  ,
,  y
y  no será cierto en general. Vamos a demostrar que sí ocurre para los datos del enunciado. Para ello, hemos de probar que el ángulo COD es recto.
no será cierto en general. Vamos a demostrar que sí ocurre para los datos del enunciado. Para ello, hemos de probar que el ángulo COD es recto.
En el triángulo OCD los lados valen



Aplicando el teorema del coseno tenemos que si  es el ángulo en O
es el ángulo en O

Por tanto el ángulo es efectivamente recto y los vectores de posición relativos son


y la velocidad angular del movimiento {20} valen

Movimiento {32}
De nuevo empleamos la ley de composición de velocidades angulares para hallar la del movimiento {32}

Movimiento {21}
Por último, para hallar la velocidad angular con la que gira un disco respecto al otro empleamos de nuevo la ley de composición de velocidades empleando el aro “0” como sólido intermedio

Alternativamente, podemos emplear la barra “3” como sólido intermedio

Centros instantáneos de rotación
La mayoría de los centros instantáneos de rotación son inmediatos. De hecho, todos menos uno.
- Movimiento {30}
- El movimiento de la barra “3” respecto al aro “0” es una rotación alrededor del centro de éste. Por tanto

- En forma vectorial

- Movimiento {13}
- Respecto de la barra “3”, el disco “1” realiza una rotación alrededor de su centro, por lo que

- En forma vectorial

- Movimiento {23}
- Análogamente, el disco “2” ejecuta, respecto de la barra “3”, una rotación alrededor de su centro:

- En forma vectorial

- Movimiento {10}
- Dado que el contacto entre el disco 1 y el aro 0 implica rodadura sin deslizamiento, el CIR del movimiento es el punto de contacto

- En forma vectorial

- Movimiento {20}
- El disco “2” también realiza, respecto del aro “0”, una rotación instantánea alrededor del punto de contacto, por lo que

- En forma vectorial

- Movimiento {21}
- Este es el único que no es evidente. Podemos hallar este punto analítica y gráficamente. Para calcularlo de manera analítica precisamos la velocidad de un punto. Si queremos la posición respecto al punto O, la fórmula correspondiente es

- Necesitamos la velocidad del punto O en el movimiento {21}. La obtenemos aplicando la fórmula de composición de velocidades. Los movimientos {20} y {10} son rotaciones instantáneas alrededor de los puntos B y A por lo que

- Sustituyendo los valores numéricos

- Llevando esto a la expresión analítica del CIR nos queda

También podemos hallar este CIr empleando la fórmula

que para este caso nos da

Alternativamente, este CIR puede obtenerse gráficamente. Por el teorema de los tres centros, el CIR  se encuentra alineado con los dos centros
se encuentra alineado con los dos centros  e
e  . Por tanto, se encuentra sobre una recta que pasa por A y B. Asimismo, se encuentra alineado con los centros
. Por tanto, se encuentra sobre una recta que pasa por A y B. Asimismo, se encuentra alineado con los centros  e
e  . Por ello, pertenece también a la recta que pasa por C y D. El CIR buscado se encuentra entonces en la intersección de estas dos rectas, la que pasa por AB y la que pasa por C y D.
. Por ello, pertenece también a la recta que pasa por C y D. El CIR buscado se encuentra entonces en la intersección de estas dos rectas, la que pasa por AB y la que pasa por C y D.
Algebraicamente, esto se expresa observando que el vector  debe ser proporcional al
debe ser proporcional al 

y el  al
al 

Sustituyendo tenemos

Hallamos el producto vectorial y lo igualamos a cero

de donde
 ⇒
⇒ 
y respecto al centro del aro

Igualmente, puede verificarse que se encuentran alineados los centros  , e , por un lado (los tres están en el eje ) y los centros , e por otro (sobre el eje ).
, e , por un lado (los tres están en el eje ) y los centros , e por otro (sobre el eje ).
Cuando las discos van avanzando sobre el aro, los seis centros van girando respecto al aro, manteniendo una posición fija respecto al sólido “3”.

